Rise of the Robots
The National Space Centre is having a robot weekend in May this year: See robots from the TV series Robot Wars Compete in the battle arena Take part challenges to test your skills and win prizes Build and test your own robot, including the new LEGO Mindstorm Support your team…
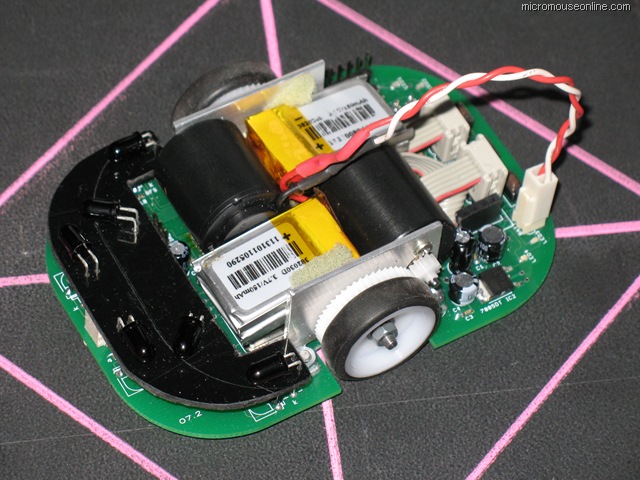
 It is true, I am losing my grip. A while ago I posted a link to a Japanese site demonstrating the grip available from a particular micromouse. A common way of doing this is to lock the wheels and place the mouse on a tilting surface. As the slope of the surface is increased, the downforce available to the tyres is progressively reduced until the mouse slips. Part of the downforce is lost due to the angle alone and is proportional to the tangent of the slope.
It is true, I am losing my grip. A while ago I posted a link to a Japanese site demonstrating the grip available from a particular micromouse. A common way of doing this is to lock the wheels and place the mouse on a tilting surface. As the slope of the surface is increased, the downforce available to the tyres is progressively reduced until the mouse slips. Part of the downforce is lost due to the angle alone and is proportional to the tangent of the slope.