This is the first time I have used the SLA7062 so I made up a small test board to make sure everything will be OK. This turns out to be a splendid motor driver and the motors can be driven to very high speeds.
The board allows the selection of half, quarter, eighth and sixteenth steps and is otherwise exactly like the circuit to be used in Primus.
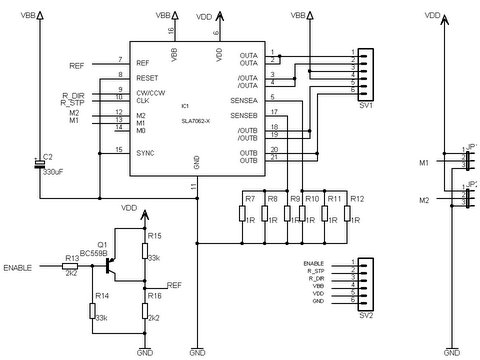
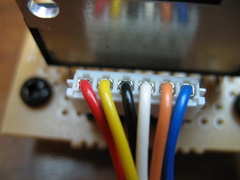
This can be laid out on quite a small board and connected to a suitable source of pulses and one of the motors. Note that the pin arrangement of the motors may not be the same as supplied It is easy enough to change the wires around in the socket supplied with the motor. Since you are going to want to shorten the supplied lead anyway, this will not be a problem with the mouse. If you are using the 103H546 motor, the default wiring should be changed. The correct order is as shown below:
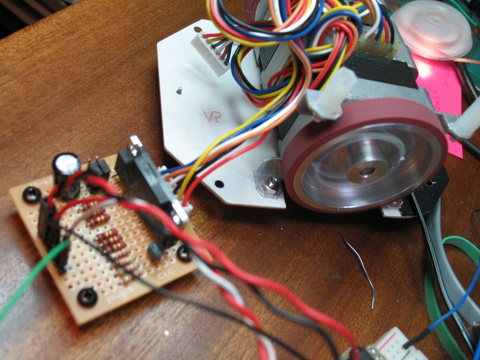
Jumpers allow the selection of the stepping rate. With both at 0V, the chip uses sixteenth-step mode. The driver was connected to a signal generator and the motor loaded only by a wheel. The drive voltage was set to 14V – about what you would get from a set of 12 NiMH calls. Running free like this, the small step size gave a very smooth response and it was possible to step the motor easily at a rate of 125kHz. If this were possible on the mouse, it would equate to a speed of about 6m/s. Since the mouse represents a much bigger load, it is unlikely that you will be able to do better than 2-3m/s. increasing the drive voltage to 24V (6 LiPo cells) would improve the top speed. Speed isn’t everything however and acceleration is much more important. Once the drivers are attached to the mouse, it will be possible to get an idea how much acceleration is possible.After improving the power supply decoupling (already shown in the schematic above) it was possible to step the motor at 300kHz with a 14.5V supply. Average current draw for the motor was about 300mA. This is much less than you might expect from the 1A per phase rating of the motors as the driver chip acts rather like a switched mode supply. Although only about 50% efficient, it is still a huge improvement over only using dropper resistors.Here is the (scruffy) test setup: