Decimus doing circuits
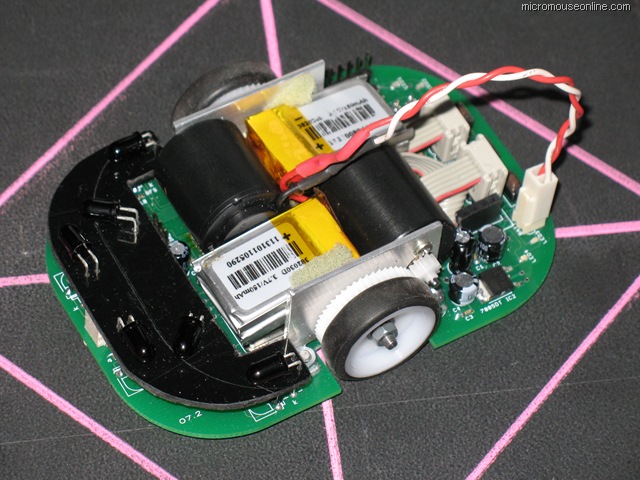 After a bit of a break, I have done some more work on Decimus, my DC micromouse. With all the peripherals tested and working, I have been concentrating on the motion controller or profiler. This has turned out to be harder than I expected. The basic idea is simple enough but the implementation turns out to be a bit tricky. Probably in part because I wanted it to be useable with Primus, the beginner’s stepper-driven micromouse.
After a bit of a break, I have done some more work on Decimus, my DC micromouse. With all the peripherals tested and working, I have been concentrating on the motion controller or profiler. This has turned out to be harder than I expected. The basic idea is simple enough but the implementation turns out to be a bit tricky. Probably in part because I wanted it to be useable with Primus, the beginner’s stepper-driven micromouse.