Edgar is my first real micromouse. An unbelievably long period of thinking and wishing eventually resulted in a mouse that is pretty much a UK version of all the mice you will see on the various south-east asian micromouse sites. Imagination and originality failed me utterly and they will get a stern talking to just as soon as I can find them. Still, you have to start somewhere and it has been hard enough making this work without coming up with every detail from scratch.
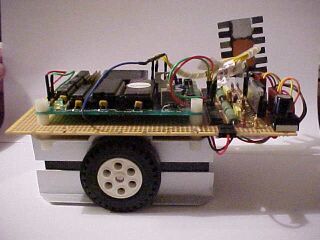
This is a tried and tested style of mouse with a pair of steppers for the drive train in a wheelchair configuration and a relatively powerful 80C196 processor to look after it. Plenty of batteries (12 at the moment) ensure a respectable performance from the steppers.
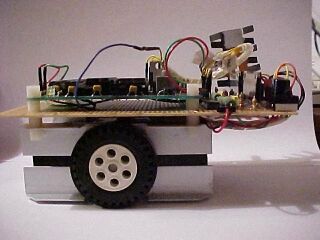
For a neat, compact design, the sensors are side-looking and fairly minimal with just three emitter-detector pairs in use at the moment. while they are capable of accurately measuring wall distance over a range of about 2-13cm, they are pretty sensitive to the reflectivity of the walls and need calibrating for the actual maze in use. I need to work on autocalibration which will be complicated by the non-linear response of the system. A surprising difficulty arises from the fact that they are very directional with beamwidths of only about 7 degrees. This is fine for detecting wall ends, but means they are very sensitive to being pointed in exactly the right direction. The next build will have to have them put into alignment blocks. to ensure accuracy and repeatability. As it is, a slight knock on the way to the maze or an unfortunate contact with the wall can result in mis-alignment.
EdgarB gets its name from being a development of Edgar which I guess could be called EdgarA but wasn’t. It also does a bit of a waggle down the straights a bit like the dance that bees do in their hives.
The rest of the page will take a while to load. There is nothing here but a bunch of pictures for now.
I will be putting up a full description of Edgar sooner or later. All the design details will be here.
Edgar pictures
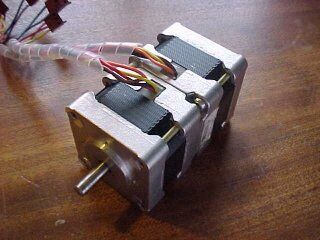 |
The two motors joined for the first time. No going back now. | |
 |
Edgar is basically a pair of stepper motors glued back-to-back and screwed to a length of kitchen worktop joiner strip. | |
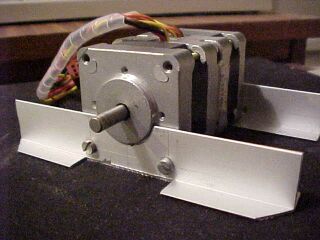 |
The aluminium extrusions are ideal for this job. | |
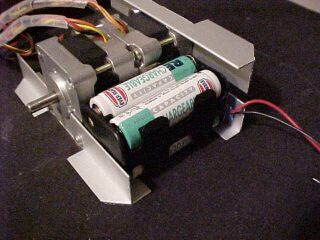 |
The size of the motors is just right to allow standard AA sized rechargable batteries to fit.
The finished beast has twelve cells altogether – they do fit though. |
|
 |
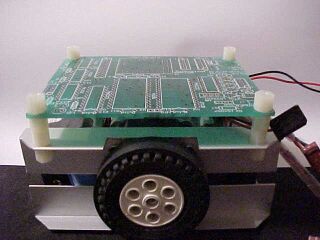
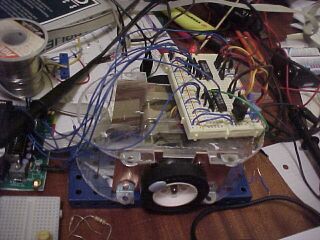
The 80C196 circuit board forms the basic shape and size of the mouse.
This board came from Australia. It was the only ready-made board I could find for this processor. I did not want to hand-wire a board (too lazy) and did not want to design a ‘proper’ DSPTH PCB (too lazy and incompetent) |
|
 |
Don’t you love it when everything works out? | |
 |
Plenty of space for now but it soon goes when we want lots of batteries for those hungry steppers. | |
 |
Unfortunately, the stepper drivers will not fit on the processor board so we need another board for them.
All that elegant sizing just went down the drain for the sake of the world’s most ugly daughter board. |
|
 |
Suddenly everything looks a lot less pretty. | |
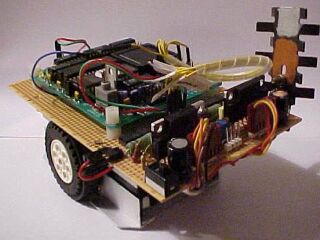 |
In case you are wondering, that thing at the back is a heatsink for the 5V supply – not a phased array radar.
Now there’s an idea – millimetric, side-looking radar. That should make all those optical mice look silly. You know, I really should get more sleep… |
|
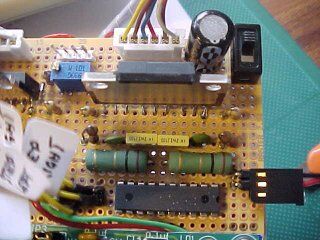 |
One motor driver channel using the Allegro 7024 stepper driver chip. I really have to get that more compact. | |
 |
An early test setup to see if the dimensions were OK and to test an early, low-tech driver using 5804 driver chips. These are very easy to use but can not get the best from the motors which really need overdriving with current controlled drivers. |