The wheels have given me so much trouble that it all has to be downhill from here. This is how they are put together.Good wheels are essential in a micromouse. We want something that is robust, reliable and capable of precision, repeatable movement. There should be no wobbling and shaking and their relationship to the body of the mouse must be constant, or at least predictable. Clearly, the grip of the tyre is essential for high performance. The wheel in a simple mouse will probably need to carry the final stage reduction gear.As far as i can tell, there simply are not any suitable wheels available off-the-shelf for a robot like Decimus. I need a wheel that is at least 26mm in diameter but as little as possible more than that. The whole thing needs to be wide enough to put a reasonably large footprint on the maze floor but narrow enough to allow me to keep the overall width of the mouse down to somewhere between 70mm and 80mm.Another key requirement is repeatability and availability of parts. I have any number of suitably shaped round things and a bewildering assortment of gears. However, I want to be able to make more wheels the same as these so I have to use readily available components and materials.
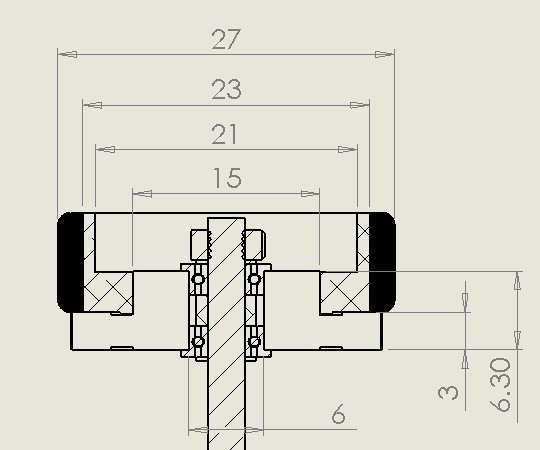
The gears are a reasonable place to start. I wanted a gear ratio of about 4:1. This leads to a natural choice of a 48 tooth 0.5module spur gear as the final drive and a 12 tooth 0.5module pinion on the motor. Relatively speaking, the world is awash with gears just like these. Until you come to find one for the job. Gears of any size and shape are available from manufacturers for prices that will make your eyes bleed. In the end, the closest I could get to perfect was a stock acetal gear from Farnell. This has a hub with a 6mm bore and 15mm outside diameter. This is perfect as there exist small bearings that fit exactly in the bore and then on to a 3mm shaft which is ideal as 3mm rod for the axle is easy to get and can have an M3 thread cut for a retaining nut. So far so good.It seemed simple enough to make a wheel that would press on to the hub of the gear. Such a wheel would be about 7mm wide and a perfect fit for the very handy tyres intended for mini-z racing cars.
I am fortunate in having a lathe and turned the wheels from a bar of acetal. A better choice would have been aluminium.Once the wheel was in a part finished state, it was temporarily attached to the gear hub so that the hub could be machined down to the required thickness. This thickness was chosen to allow a flanged bearing at either end with a 2.5mm gap between them inside the centre bore. A spacer, made from a piece of 4.8mm rod goes between the two bearings to take the axial thrust.
Those tiny bearings cannot withstand much axial load before they begin to bind.Although the wheel is a press fit on the hub, it will not stay there through friction alone. Superglue is an obvious choice but does not bond welle enough to the acetal in the gear and the wheel. Consequently, I had to drill and tap M3 holes into the hub and wheel and screw them to gether. Two screws is the least I can do and have the wheel balanced. These screws don’t so much hold the bits together as stop them from coming apart.Small washers prevent the mounting plate and nut on the end of the axle from binding against the outer part of the bearings.Making more of these will be reasonably easy but then I have a lathe.
There are bound to be easier and more expedient methods but, so long as the tools are available, it is silly not to make use of them. I have a few of the Farnell gears and can easily make more wheels without worrying about the fact that I only have three from that old car I bought at a car boot.I don’t think the bearings are really necessary and a simple bush or plain bearing will do the job. Washers could be soldered to the axle in the same way as model aircraft builders have been doing for decades. Spacer washers would set the endfloat perfectly adequately.
Gears can be glued to existing wheels as long as care is taken to keep them concentric with the axle. The Mini-Z racers and their like have excellent little wheels which could probably be modified to suit.
You have stated that your reduction ratio is 4:1, wheel dia is 27 mm and that your top speed is about 5 m/s.
But, the 2224 motors that you use have a no load rpm of 8000, which on reducing by a factor of 4, result in a 2000 rpm wheel speed. This results in a speed of approximately 2.8 m/s, which is inconsistent with the stated 5 m/s.
Am I missing something?
If possible, please show your calculations.
You are quite right. The top speed referred to will be the most I can manage from the encoder resolution rather than what I can get from the batteries. However, the actual top speed is a little over 3m/s since I use a 2 cell LiPo battery. With a 3 cell pack it could reach the 5m/s.
What is the rated voltage for your motors? I have the 6 volt ones, and I’m afraid to use them at a higher voltage since they cost a bomb. Is it safe to exceed the said limit? I am also planning to use a 2 cell LiPo battery, but I was thinking of stepping down the voltage to 6V to drive the motors. It would save me quite some trouble if overvolting them by a volt or so doesnt harm the motors.(I’m quite sure it doesnt matter, but I’m being extra cautious just in case.)
They are 6 Volt motors. Even if you ran them at a full 7.2v, they would be fine with the loads presented by a micromouse. A couple of things make the voltage relatively unimportant. First, there will be some loss in your motor driver so you may well not get as near to 7.2 V as you think. Second, these motors are very overpowered for a micromouse and you may find you never get to run them at full 100%PWM. Or not for long anyway. Acceleration from a standstill only needs about 0.75V. Do the sums, that really is all. Worst case is acceleration/deceleration while running at top speed. Then you may need all of the battery voltage to get enough current through the motor because of the back-emf generated by a turning motor.
To summarise … The motors rarely run at full voltage. Even then it is not for long. They never get warm to the touch – they are horribly overpowered.