Decimus the wall follower
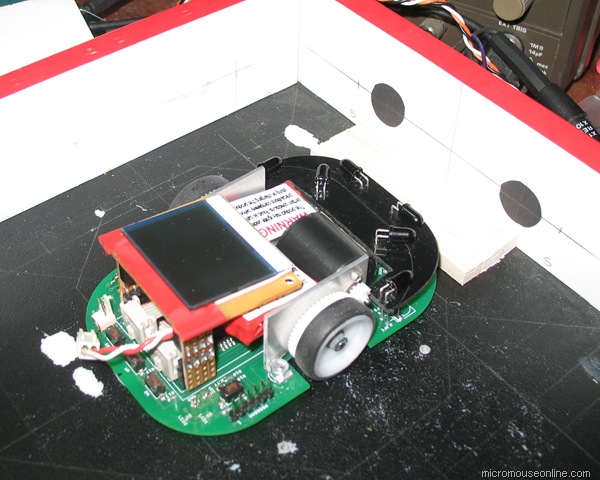
 We often tell beginners that they can learn a lot by building a non-contact wall following micromouse. If it can keep track of where it is and knows when it is in the centre of the maze, most of the hard problems have been solved. To get to that stage, you need working sensors, reliable motor control and good information about the maze and the mouse’s position in the maze…
We often tell beginners that they can learn a lot by building a non-contact wall following micromouse. If it can keep track of where it is and knows when it is in the centre of the maze, most of the hard problems have been solved. To get to that stage, you need working sensors, reliable motor control and good information about the maze and the mouse’s position in the maze…


 It is true, I am losing my grip. A while ago I posted a link to a Japanese site demonstrating the grip available from a particular micromouse. A common way of doing this is to lock the wheels and place the mouse on a tilting surface. As the slope of the surface is increased, the downforce available to the tyres is progressively reduced until the mouse slips. Part of the downforce is lost due to the angle alone and is proportional to the tangent of the slope.
It is true, I am losing my grip. A while ago I posted a link to a Japanese site demonstrating the grip available from a particular micromouse. A common way of doing this is to lock the wheels and place the mouse on a tilting surface. As the slope of the surface is increased, the downforce available to the tyres is progressively reduced until the mouse slips. Part of the downforce is lost due to the angle alone and is proportional to the tangent of the slope.