 Video from the UK Micromouse 2009 competition is now available on YouTube. These cover the maze solver and non-contact wall follower classes.
Video from the UK Micromouse 2009 competition is now available on YouTube. These cover the maze solver and non-contact wall follower classes.
Video from the UK Micromouse 2009 competition is now available on YouTube. These cover the maze solver and non-contact wall follower classes.
Excellent Pete … many thanks for taking the time to edit so much of the finals.
Nice videos!
Decimus does something unusual from 1:50 to 2:22. It goes to and fro along the starting straight, looks like he is sort of, checking out the path. Is it auto-calibrating the sensors for fine tuning before the speed runs?
Mouse X2 was pretty cool too, that slow but precise movement to correct the Forward Error was pretty unique. I am sure that middle front sensor was coming into play every time.
It is a transcoding error on the video. Decimus never goes backwards. It takes so long to convert from DVD and render up the video that I am afraid I couldn’t be bothered to do it again 🙂Sorry – I thought you were referring to something else. There are transcoding errors where mice jump about a bit – there is one at about 2:13 – but this is not it. I just went back and looked again.
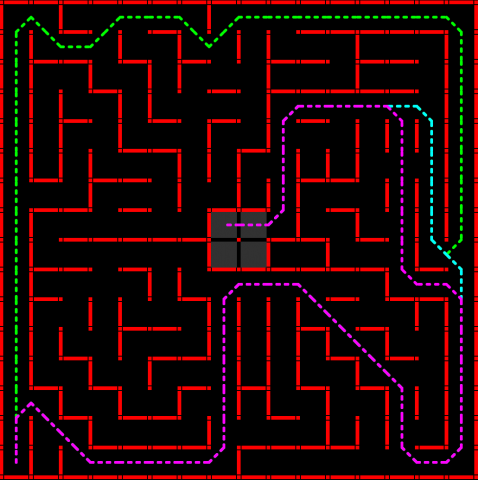
The algorithm should prevent it from returning to the start until it has found an optimal route.
The technique is to first find the goal then look for unvisited cells on what it thinks is the best route. It does that by going from one end to the other of the intended route. In this case, there were some cells in the top corner that it wanted to know about but the algorithm is not smart enough to avoide checking back to the start again after each of the newly discovered cells. All in all, it is a bunch of stuff added to over the years and wants throwing out and re-writing from scratch.
Nice competition! I would like ti see more speed from the micromouse to find the maze! However congrarulation to the creators, its amaze to see stuff like this and I believe that its difficult to develop such technology….