Decimus 2 sensor geometry
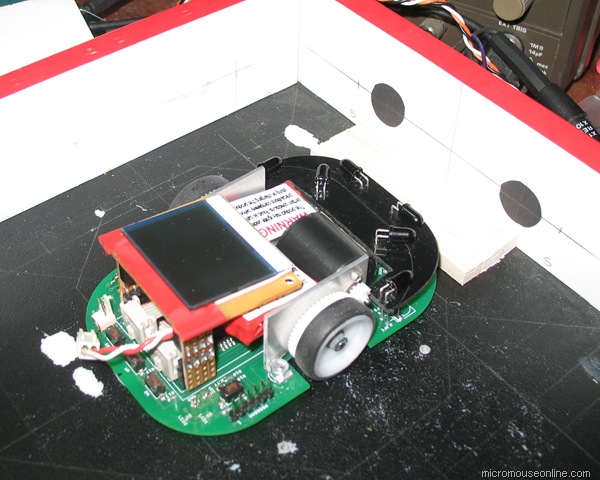
 Decimus 2 is now nearly ready to go. I don’t have much hope of having it ready for the Japan contest but it is worth a try. The mouse weighs only 2/3 as much as its predecessor at about 115g with batteries. This weight saving is almost entirely due to the use of the new 1717 size motors. It looks like everything is working so today, I set up the sensors. These have a different alignment to those I have used before.
Decimus 2 is now nearly ready to go. I don’t have much hope of having it ready for the Japan contest but it is worth a try. The mouse weighs only 2/3 as much as its predecessor at about 115g with batteries. This weight saving is almost entirely due to the use of the new 1717 size motors. It looks like everything is working so today, I set up the sensors. These have a different alignment to those I have used before.
Line Follower Sensors Setup
 With the sensors installed and the robot pretty well complete, it is time to see if they can actually do the job they were designed for. the idea is that the line of sensors will be able to measure the robots offset from the centre of the line over as wide a range as possible.
With the sensors installed and the robot pretty well complete, it is time to see if they can actually do the job they were designed for. the idea is that the line of sensors will be able to measure the robots offset from the centre of the line over as wide a range as possible.
Line follower sensor experiments
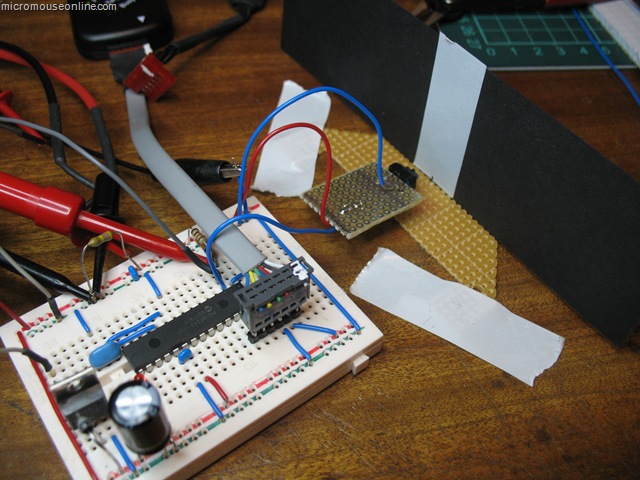 The simplest arrangement for a line follower is probably two sensors with digital outputs. As long as one can see the line and the other can see the background, the controller is happy otherwise it must turn left or right as appropriate. I was after something a bit more sophisticated for Bob the Line follower…
The simplest arrangement for a line follower is probably two sensors with digital outputs. As long as one can see the line and the other can see the background, the controller is happy otherwise it must turn left or right as appropriate. I was after something a bit more sophisticated for Bob the Line follower…
New line follower robot
 Line followers are a perennial favourite of the small robot builder. It is not hard to make something that will bumble about and follow a line marked out on the floor. the technology can be very simple but the same basic idea is used in sophisticated robots on factory floors. The tricky part is in making the line-follower fast and smooth in its response. Whether or not I can do that remains to be seen but I am going to have a go …
Line followers are a perennial favourite of the small robot builder. It is not hard to make something that will bumble about and follow a line marked out on the floor. the technology can be very simple but the same basic idea is used in sophisticated robots on factory floors. The tricky part is in making the line-follower fast and smooth in its response. Whether or not I can do that remains to be seen but I am going to have a go …
Sensor alignment
 For consistent results, the sensors on a micromouse need to be carefully aligned and then fixed in place. In a perfect world, the emitters would all have the same radiation pattern and would generate the same amount of illumination for a given current. Well, that is never going to happen without hand-picking the devices. That would take a long time so we make do with what we have and work around their limitations. Similarly, the detectors have variations to cope with as well. The first step is to get the emitters lined up and pointing where they should…
For consistent results, the sensors on a micromouse need to be carefully aligned and then fixed in place. In a perfect world, the emitters would all have the same radiation pattern and would generate the same amount of illumination for a given current. Well, that is never going to happen without hand-picking the devices. That would take a long time so we make do with what we have and work around their limitations. Similarly, the detectors have variations to cope with as well. The first step is to get the emitters lined up and pointing where they should…
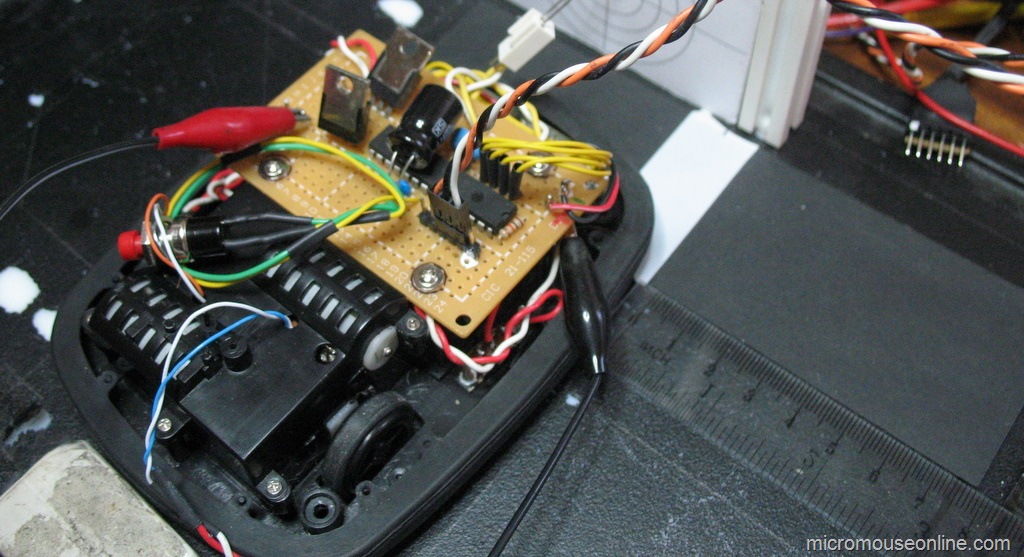
Feeling our way with sensors
The sensors are a critical part of a micromouse. Primus uses six infra-red reflective sensors. Here is code to test that they are working.Now that we have a nice display to show what the sensor reading are, we can get that module tested. Since the hardware is very simple, there is not a lot to go wrong. Yet somehow I had a dead sensor when I first tested the Primus prototype. It was a simple dry joint that would have been detected by more careful inspection of the board. (more…)
Sensor Data Analysis
Micromouse sensors are subject to several sources of error and interference. Capturing a set of data samples lets you do some simple analysis of the effects of those errors.The test rig was set up with a section of wall placed at about 50mm from the sensors. This gives a large…
Sensor test
The simple sensor circuit described by Ng Beng Kiat seems to give the best results.On his web site (http://www.np.edu.sg/alpha/nbk/) Beng Kiat describes Min4, one of his recent mice. In there is a PDF with schematics for the mouse. The sensor circuit for Primus is essentially the same except for a…