 Line followers are a perennial favourite of the small robot builder. It is not hard to make something that will bumble about and follow a line marked out on the floor. the technology can be very simple but the same basic idea is used in sophisticated robots on factory floors. The tricky part is in making the line-follower fast and smooth in its response. Whether or not I can do that remains to be seen but I am going to have a go …
Line followers are a perennial favourite of the small robot builder. It is not hard to make something that will bumble about and follow a line marked out on the floor. the technology can be very simple but the same basic idea is used in sophisticated robots on factory floors. The tricky part is in making the line-follower fast and smooth in its response. Whether or not I can do that remains to be seen but I am going to have a go …
There has been a bit of discussion lately about a simple line-following competition to replace a couple of the schools contests at the micromouse events. You can see the proposal on the forum:
https://micromouseonline.com/forum/viewtopic.php?f=3&t=281
So that there is at least one entry, I agreed to build a follower in time for the November RoboTic event in Birmingham (http://www.tic.ac.uk/micromouse/ROBOtic08.asp).
Right, the question is, what to make it out of. I looked at various options for motors and was about to order some small gearmotors. These came in at about £12 each and would need wheels making and tyres fitting.
 |
Then I happened to be in Maplins and I saw a pair of radio controlled dodgem cars. These are supposed to be driven against each other in a little competition that would be unlikely to be entertaining long after Boxing Day. However, they were differentially steered with the wheels at the back and looked ideal for a conversion. At just £19.99 for the pair, they were considerably cheaper and easier than making it all from scratch although unlikely to be blindingly fast. |
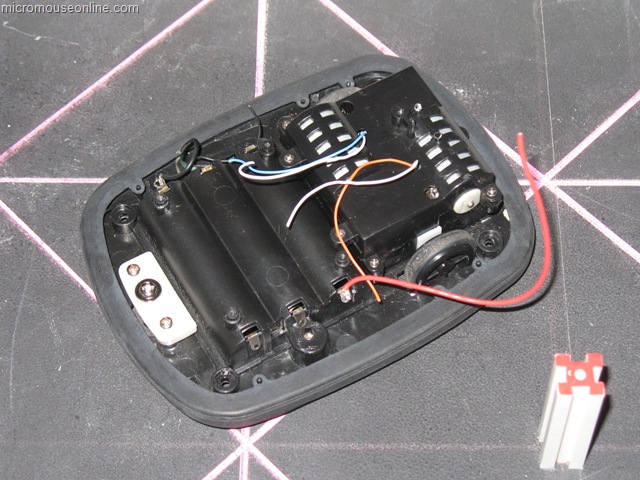 |
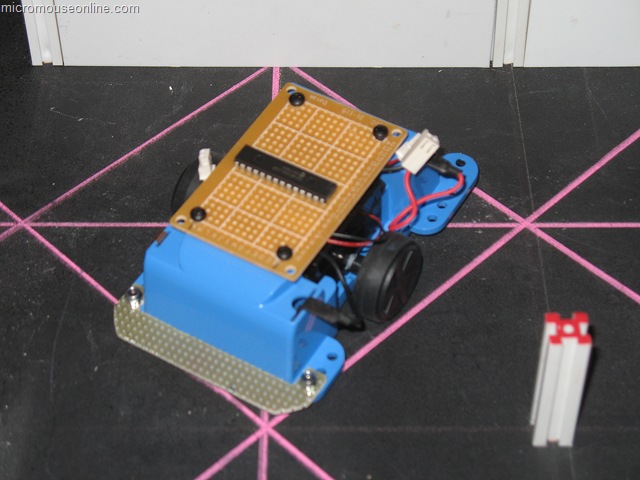
Once you open it up and strip out the existing control board, you are left with what seems to be a perfect base for experimenting. With the wheels right at the back and a convenient location right near the front, it could have been made for the job. The motors draw about 800mA when stalled on a 4.5V supply and the 3 AA cell holder will allow the use of cheap Alkaline cells to run the thing. The processor should be happy at that voltage although noise might be an issue. |
 |
I did also look at the commonly available chassis you see on the left. This is used in a variety of robots and robot kits. It is good to work on with mounting points for the circuit boards and sensors as well as a convenient holder built in for four AA cells. Ideal for NiMH batteries. However, when tested, not only is it quite small, it makes an amazing amount of noise and would keep the household up at night. Good enough choice if you can’t find the dodgems though. |
For the controller, I chose aPIC18F252 because I happened to have three of them spare. the newer 18F2520 might be a better choice now. the PIC is handy because development tools in the form of MPLAB, the PicKit2 and a C compiler are easy to get. The software is free and the PicKit2 can be had for very little cost considering its versatility.
Sensors are the Vishay TCRT5000 IR reflective sensor available from Farnell among others. With an eye to future development, I chose to put five sensors in the beast. This should give me better than needed resolution and will allow a ‘proper’ PD controller rather than the usual on-off type of control seen when only using two detectors. Of course, various simpler digital control schemes can be tried anyway with these sensors. I was specifically looking for versatility so that I can experiment with a range of strategies.
To drive the motors, I was going to use the ubiquitous L293D. However, these are not terribly cheap now and I have no obvious requirement to drive the motors in any direction other than forwards. After a poke about in the parts trays, I found a collection of TIP122 Darlington transistors. These will handle plenty of current. To be on the safe side, I added flyback diodes across the motors although I would expect the TIP122 to survive anything these little motors can generate. We will soon see.
With all the parts decided, it is time to get building.
hello
I need article to subject : micromouse robote
please help me.
thank you.
do have any simple design? that will be use only recycled materials?
Sorry. What you see is what there is.
im engineering student please be send me circutes abouts robotics