 When I applied power to the motors on Zeetah VI (ZVI) for the first time, the motors seemed to struggle and the PWM value to get the wheels to rotate seemed higher than usual. Since this was my first four wheel mouse of this configuration (ZIV is a four wheel drive, four wheel steer mouse), I wasn’t sure if the higher load was normal or not.
When I applied power to the motors on Zeetah VI (ZVI) for the first time, the motors seemed to struggle and the PWM value to get the wheels to rotate seemed higher than usual. Since this was my first four wheel mouse of this configuration (ZIV is a four wheel drive, four wheel steer mouse), I wasn’t sure if the higher load was normal or not.
Pierre had made integrated hubs and gears and previously we had to break in the pinion and spur gears so thinking that was perhaps what was going on, I ran the motors on the mouse for thirty seconds at a time for a few minutes.
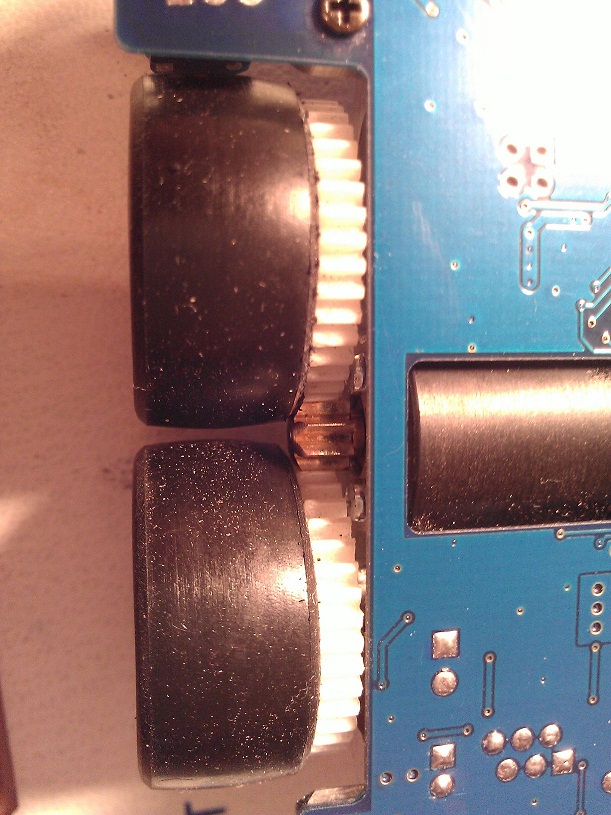
About ten runs into the break in I noticed black material on the spur gear and it became clear that the pinion gear was interfering with the inner edge of the tire.
Since the pinions were glued (Loctite Red 271) to the motor shaft there was no simple way to remove them and file them, I decided to sand them down on the shaft. From my model airplane building, I have a sanding bar with 220 grit sandpaper.
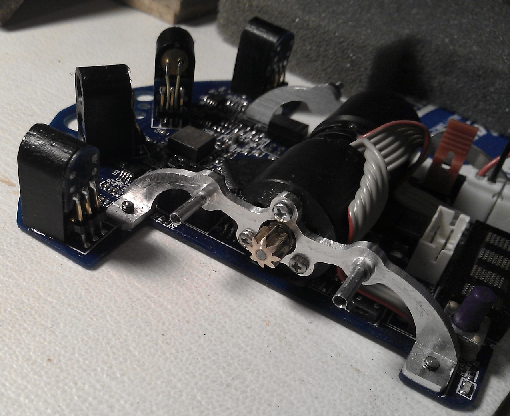
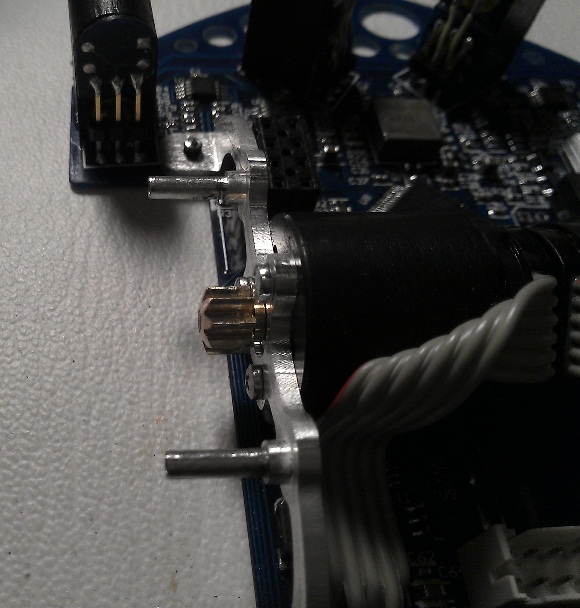
I removed the hubs, covered up the area around the pinion to prevent the brass pinion dust from going everywhere and ran the test program which ran the motors at around 2500RPM and gently pressed the sandpaper against the pinion.
The wheels turn much more freely. Compared to ZV, they are still a little tight but I’m sure once I get more mileage on the mouse, the resistance will go down.

The tear looks cool 🙂
When I look at ZVI, I can’t recognize, what is the black think with four light rectangles situated in the back, next to the button?
The four black blocks are part of the sensors – they house the lens and emitter and hold them in alignment with the position sensitive detector.
I think Bodie means the display at the rear of the mouse. This is (I think) one of the four character 5×7 dot matrix displays from Avago in the HCMS series.
Smart Alphanumeric Displays
Oops. It is as Peter says a four character 5×7 dot matrix display.
I happen to be using an OSRAM SCE5744; I wasn’t aware of the Avago devices…
Yes, I mean the display. Thanks for explanation.