Taking part in the finals of the all Japan micromouse contest can be a nerve-wracking experience. One Japanese contestant, whom I had barely spoken with before, and whom I thought was a certainty for a good place just walked up to me and said “I am so very nervous. I feel pain in my stomach”. He was far from alone.
It is a big day for everyone. Countless hours of hard work. No small amount of money and, for the international competitors, some serious travelling all culminate in five minutes of glory or anguish. You stand there, watching a machine that you have lovingly crafted and elaborately coded wondering just why it is doing the things it does. The audience – or at least, those of them who have not built a robot – think they are watching precision engineering and some remarkable artificial intelligence at work. This is all true but what they don’t know is that, once you have turned it loose, your micromouse takes on a mind of its own. Several contestants this year were found to be watching aghast as their mouse failed to perform a speed run, got lost, went off on trips of their own, pretended to know where the goal was when they clearly didn’t or simply succumb to a suicidal urge to crash into some random part of the maze.
Overall, it can be a frustrating day or great day. Or even both.
Getting ready to run
For me, the day started with a bit of a flap. Having qualified in fifth place I did not have to run until rather later in the day. However, I had decided to fix an issue I had spotted the day before. Each turn is limited in speed to help prevent the mouse from skidding out of control. However, if the mouse arrives at the start of a turn and it is doing the wrong speed, it will try and perform the turn at that speed rather than just giving up. There is a short space before a turn where the mouse is supposed to be at turn speed and the speed gets fixed. This can be a problem if the previous turn was very fast and the straight that comes after it is very short. Then the mouse does not have enough room to slow down and the next turn gets run at far too high a speed and the mouse will crash.
I thought that might be the reason for the unfortunate results from the qualifying session so I fixed it and allowed the mouse to change speed in the time after it starts to prepare for a turn and before the turn actually starts. This was a little risky so I had to get it tested out while I still had access to a bit of test maze. It all looked OK so I put the mouse to one side and went off to watch the other contests.
Line Following
First up was the Robotrace Line following contest. This is a surprisingly difficult contest with brutal timing constraints. The course can be up to 60m long and will be full of surprises.
The New Technology Foundation, who run the contest, published the track details after the event:
http://www.ntf.or.jp/mouse/micromouse2015/MM2015RT.png
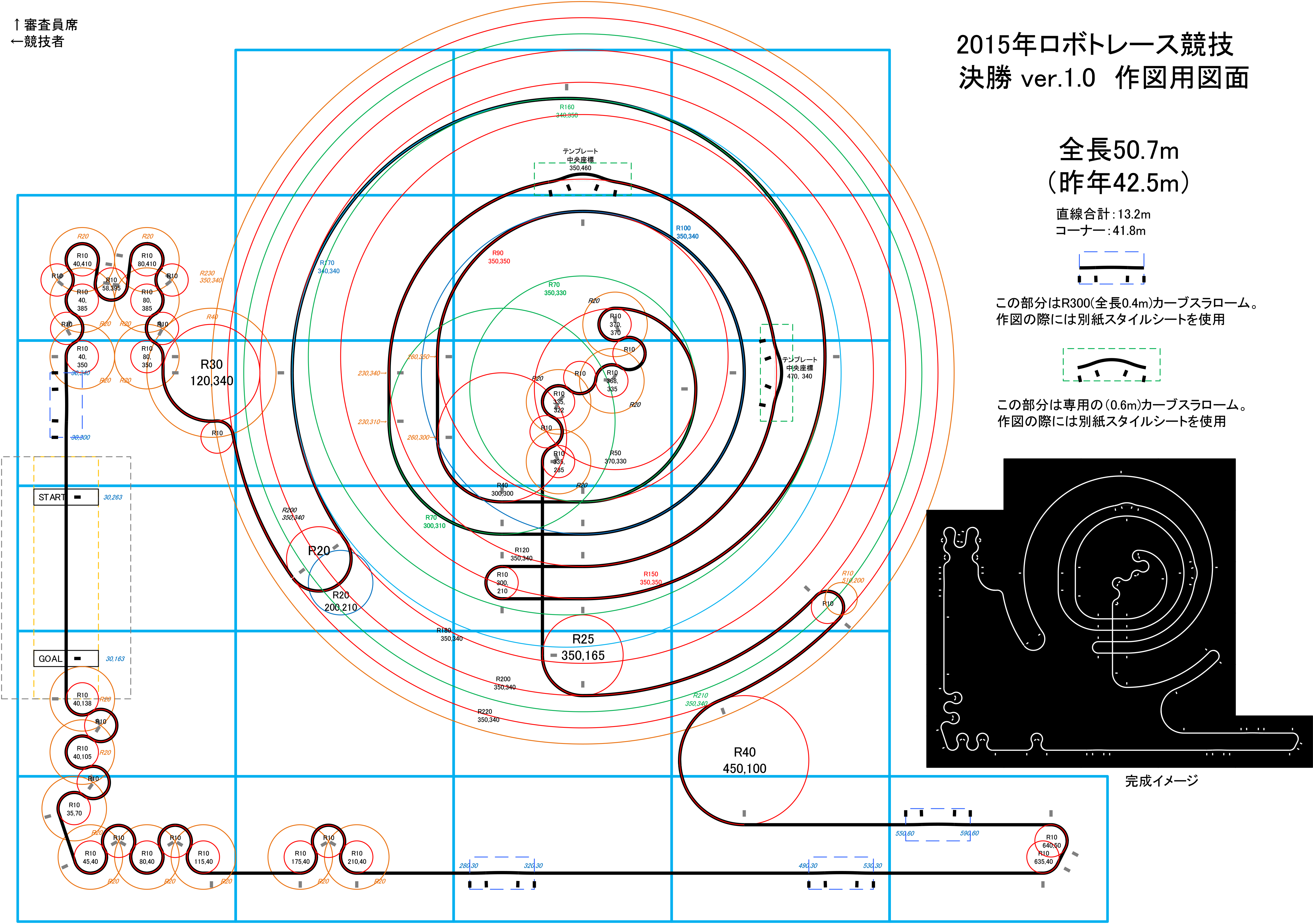{kind=link}
Many highly rated runners failed to complete speed runs and the championship title was retained by Hirai-san. He is har to beat but two robots from Lunghua took second and third place. I would not bet on Hirai-san beating them next year.
You can see the full results on the NTF page.
Classic micromouse
For a while now, the Japan contest has referred to the full-size micromouse contest as the classic micromouse. It remains popular and the finals saw 34 runners. Of those 23 came through from the qualifiers and 11 were seeded runners who get a place in the final by winning a regional contest.
The maze was interesting. There were clearly two main paths:
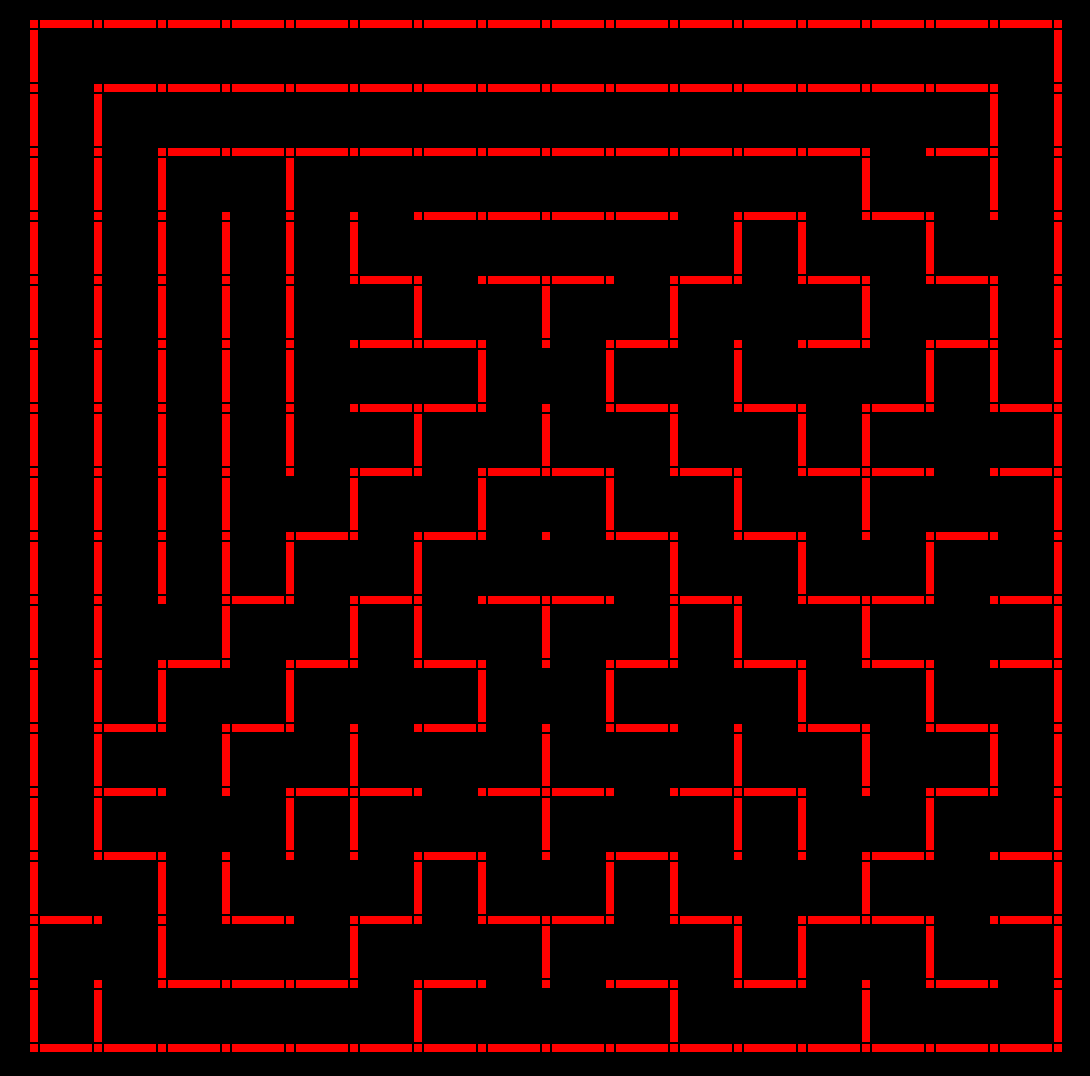
A long path up the left side was 17337mm long and a much more twisty path along the bottom edge that was only 11857mm long. Many mice can choose a route based on more than just its length. Even so, it would be difficult to prefer the longer route unless straight line top speed was very high.
It was all very well finishing the qualifiers in fifth place but the pressure was really on from a number of Japanese mice that had already won a contest recently. Among the seeds were some of the best mice in the land.
Unfortunately, the most notable upset came from last year’s champion, Utsonomiya-san, who could not get his mouse to perform a speed run and had to retire.
Decimus 4E managed a good run but, like the day before was unable complete the course at higher speed settings. This was frustrating and the four mice to follow were all very good. Kheiw Tzong Yong ran his new 8 wheeled mouse and posted a first fast run time only 2ms slower than Decimus 4E. He soon made up for that with some very good runs at higher speed settings.
Next up was Ng Beng Kiat who has been so successful in this contest. However, his mouse chose to take the long way round and even though he was able to post a time worryingly close to mine, it was just too much of a challenge and he was unable to beat that.
Finally, there were the last two suction mice. These have a fan to keep then down on the ground and typically allow turns to be run up to 50% faster than would be possible without the fan.
First of these was Que, a Japanese mouse, that ran perfectly and gave a best time of 6.307 seconds. This is really remarkable over such a course. It represents an average speed of nearly 1.9m/s and turn at more than 3.5g. The suction fan appeared to give a competent mouse builder a huge advantage. The next fastest non-suction mouse managed 7.809 seconds.
Finally, there was Diu Gow, another suction mouse, this time from Lunghua University. While fast, this was a little less reliable than Que and only managed one speed run. However, with a time of 6.701ms it was the winner by a small margin.
For full results, have a look at the NTF results page here:
http://www.ntf.or.jp/mouse/micromouse2015/MM2015recode01.html
For my part, I was really pleased. Decimus 4E was in fifth place thus achieving an ambition held for many years to get a place in the prize list at the All Japan Micromouse Contest. Next year, I have my sights set on a top three place. I fear it will not be possible without a suction fan though.
Micromouse Half Size
For those who want a little more of a challenge, the whole contest is shrunk to half size but with no loss of performance. Having mice that are half as big allows mazes to be much larger and more complex. The contestants have all the design features of their full-size counterparts but with more careful engineering.
I did not see all of the contest but the last few entries produced an exciting finish. Searching strategy and route selection play a much larger part in the success of a half-size mouse and the contest does not always go just to to the fastest. The winner, Sapphire, had an excellent run and was nearly a full second faster than the second place entry, much to the great pleasure of the crowd.
Again, the maze layout and result can be found at the New Technology Foundation contest page.
This was another great contest – especially from a personal point of view. The organisation was excellent and I managed to meet many new competitors as well as put faces to some people I had not seen although I had come across online.
I must thank the New Technology Foundation and all the staff and helpers for putting things together and for making it all run so smoothly.
Finally, a special mention for a group of volunteers I had not hear of before. KSGG is the Kanegawa Systematized Goodwill Guide Club. They provided volunteer translators on both contest days to help overseas visitors, particularly with English and Chinese translations. They were extremely helpful and very informative about many aspects of visiting Japan. We were able to have several long chats about many diverse subjects from architecture to cookery. The All Japan contest is always a great visit but these volunteers managed to put an extra shine on the weekend. Thank you.
You can find out about the KSGG on their web page:
http://www.facebok.com/ksgg.jp
If you want to see videos, look for uploads from Su Juing-Hue who organises the Taiwan Micromouse Contest and produces great videos of all the events:
very well done peter! See you at APEC
Congratulations Pete you really deserve that 5th place with all the effort you put in over the last few years. See you at MINOS
Ken.