The UK micromouse contest returned once more to Birmingham City University as part of the annual Techfest event on June 9th, 2018. As well as the UK entries, there were also three robots from Nanjing University, China.
Altogether, 12 entries took part in the contest. Thanks to the efforts of David Hannaford and Ian Butterworth, the maze this year was in great shape. Some excellent detailed cleaning up by the Chinese entrants made sure that we had a really nice surface to run on. For some reason, I have always found the UK maze to be difficult because of some property of the surface. My mouse would gather much on the tyres very quickly and then have a lot of trouble making a speed run immediately after a search. Perhaps the maze improvements would help this year.
Getting Ready
Since we do not have a large number of entries, it is normal to have a qualifier event in the morning. This is not so much to determine who will be able to run in the finals but it does give everyone a chance to size up the opposition and to determine the running order for the final.
It was immediately obvious that the Chinese mice from Nanjing were going to pose a serious challenge. Sadly, I was unable to get pictures of the entries but even the two-wheels robots were quick. None of them used a suction fan though so, as you will see, their runtimes were only ever going to be good and should fall short of what was possible for Decimus 5A.
Rules explained
Fast run times are not the only key feature for a micromouse running under the UK rules. In fact, for most contests, there are two other important factors to take into account. One is the touch penalty.
Touching
The UK rules have quite strict penalties for touching the mouse after it has started its contest run. If, at any time, the mouse is touched by the owner, a three second penalty is added to all subsequent score times. Back when this rule was introduced, three seconds was likely to have been a small amount compared to the anticipated run time. Something like a 10% penalty perhaps. More recently though, micromouse robots would be expected to run a typical contest maze in 8-10 seconds without a suction fan so the penalty is relatively much larger.
Some contests (not the UK or APEC) allow a handler to pick up the mouse in the start square to allow for tyre cleaning but penalise a touch if the mouse is anywhere else. The Taiwan rules allow this but the apply the touch penalty differently. If the mouse runs untouched, the sore has a three second bonus subtracted. That can result in some remarkably short scores.
I have mentioned this because it may be that the Chinese entrants did not take the time to fully understand the touch penalties. One entrant, who was performing very well, grabbed his mouse as soon as it returned from the search so that the tyres could be cleaned. He may not have realised that would add three seconds to his score. It turned out not to affect the results but it does illustrate that it is important to be familiar with all the local rules when entering a contest.
Searching
The other penalty that is common to contests outside of Japan is the search penalty. In the UK, it operates like this. As soon as the mouse first leaves the start square, the elapsed time counter begins. Every time the mouse makes a run, its score is calculated as the time for tat run plus 1/30 of the elapsed time since the start. The idea is to encourage mice to search quickly and efficiently.
Again, this is a rule that goes back to the very early days of the contest and the rationale is good. There are, however, a couple of significant downsides to the rule. The chances of a mouse improving its overall score on any run after the first fast run are tiny. It pretty much never happens. That means that the mouse is very unlikely to win based just on its ability to run quickly through the maze. Instead, the handler has to make a judgement, in advance, of the fastest run that the mouse is likely to be able to make with dirty tyres after a search. Effectively, the contest is decided by the speed of search and a single speed run. After that first fast run, there is almost no point in continuing unless there is also a prize for the fastest individual run. In the days when more mice were likely to crash and need rescue, these rules worked well.
In Japan, the contest rules are more simple. The mouse can be picked up at any time without penalty so long as the judges deem it to be acceptable. Generally that means that the mouse must be clearly stopped or clearly in trouble in the maze. The mouse can be picked up without penalty in the start square. Japan contest rules allow a limited number of runs and score just the time taken for each run without any search penalty. This often makes the Japan contest more exciting as each run has the potential to improve the robot’s score and the contest tension builds wit each run. often, the overall result is not known until the last run of the last mouse.
Qualifiers
So – with all that explaining done – how did the mice perform? The thing that was most obvious to me was that the Chinese mice were fully aware of the search penalty and have very fast searching. It was also apparent that they had good strategies for dealing with the potential penalty of searching for too long rather than getting in a speed run as soon as possible. I also had the feeling that they were aware that there was nothing much to be gained by running many times after that first fast run.
This is where it was useful to see the other contestants run ahead of the main event. My search time was nowhere near what I imagined in my head and so I was unlikely to get a winning score with the parameters that I had. When I went back to the computer, I realised that I had forgotten to restore some of the usual parameters. On a recent trip, I had turned down the search speed considerably. Since I had been running mostly as a demonstration, the mouse was set up for maximum reliability. Now that I was on the freshly cleaned and prepared surface of our contest maze, I could restore my normal search speed parameters.
It was not clear that was going to be enough though. My search was still not as fast as theirs. This was not so much because the mouse moved more slowly. I was losing time in adjusting position after a 180 turn. These are a horrible waste of time in any search and, while I increased the speed of the turn, I was not ready to do away with the position fix.
The other strategic decision was the selection of the first fast run speed. It had to be completely reliable but as fast as possible. Normally, I search thoroughly and the mouse returns with fuzzy tyres so, again in the interests of reliability for a recent trip, I had the first fast speed set very low. The maze seemed to be in good shape and the tyres looked fairly clean after the search so I could afford to increase the initial run speed. It was not at all clear how much would be safe. As it turned out, I could have been a lot more aggressive.
Timing gear
During the qualifier, a curious feature of the timing gear made itself known. The timing system is new and is a product of a collaboration between Ian Butterworth and David Hannaford. It has been a valuable addition to the contest equipment. When Decimus was running at higher speed settings in the qualifier, suddenly the timings became much larger. It was apparent that D5A was able to pass through the gate faster than the timing system could register and so it only triggered when the mouse want back through on its way out. This was quite amusing but could be a problem in the final. Eventually, we agreed that the simplest solution for the day was to ensure that the entrance to the goal area was a 90 degree turn so that the robots would be going more slowly and would also occlude the sensor for longer. Someone suggested I should trail a large paper flag. I was suitably unimpressed.
After the qualifier, the times looked like this:
| Mouse Name | Contestant Name | Score Time |
|---|---|---|
| ROBO-3 | Yang Liu - WenTing Xu -Liang Liu-Xiaopeng Zhao | 10.607 |
| Decimus 5A | Peter Harrison | 11.327 |
| Fat Cat 3c | Tim Foden | 15.103 |
| MouseX | Derek Hall | 18.170 |
| MouseX2 | Derek Hall | 22.803 |
| PicOne Turbo | Jim Chidley | 24.200 |
| ROBO-1 | Liang Liu | 28.577 |
| FAB1 | Derek Hall | 30.522 |
| PicOne | Jim Chidley | 34.007 |
| ROBO-2 | Xiaopeng Zhao | 35.710 |
| Kaasjager | Coen Roos | 49.593 |
| ChunChu | Suresh Ballina | 66.037 |
| Mouse Name | Contestant Name | Score Time |
| ROBO-3 | Yang Liu – WenTing Xu -Liang Liu-Xiaopeng Zhao | 10.607 |
| Decimus 5A | Peter Harrison | 11.327 |
| Fat Cat 3c | Tim Foden | 15.103 |
| MouseX | Derek Hall | 18.170 |
| MouseX2 | Derek Hall | 22.803 |
| PicOne Turbo | Jim Chidley | 24.200 |
| ROBO-1 | Liang Liu | 28.577 |
| FAB1 | Derek Hall | 30.522 |
| PicOne | Jim Chidley | 34.007 |
| ROBO-2 | Xiaopeng Zhao | 35.710 |
| Kaasjager | Coen Roos | 49.593 |
| ChunChu | Suresh Ballina | 66.037 |
These results are more interesting when you look at what actually happened with the mice. ROBO-3 finished in first place. It found the goal in just 35.24 seconds and then searched straight back to the start and did its speed run in 8.12 seconds. Because it did not search the maze more thoroughly only about 72.8 seconds had elapsed by the time it reached the goal for the second time. Thus the scrore was 8.12 + 72.8/30 = 10.61 or so.
By contrast, Decimus 5A first found the goal cell after 31.34 seconds but then spent another 110 seconds thoroughly searching the maze for a better route. It did not actually improve the initial route but just used up valuable searching time. Consequently, when it finally got around to doing is first speed run in 8.19 seconds, the score was 8.19 + 140.4/30 = 11.33. Now, I could have changed strategy to search less thoroughly before doing the speed run but I have done a lot of trials that seem to indicate that this will only improve matters half the time and the final maze would be different.
ROBO-1 was the fastest searcher and managed to discover the goal in 27.66 seconds – an impressive performance. It was that which made me look again at my search speed parameters.
Finals
As usual, there was no real plan for a finals maze so we collaborated on making one up. This is far from ideal since it is almost impossible to avoid some kind of bias in how the maze is laid out. However, several contestants had a chance to assist and make changes so we can only hope it was reasonably fair in the end.
The results was amaze with routes that would favour mice with solvers that preferred straights and those that counted cells or could estimate the actual run cost. The shorter route was 8.8m and the longer one 9.8m. Decimus took the short (purple) route to the goal and the longer (green) route back. No idea why.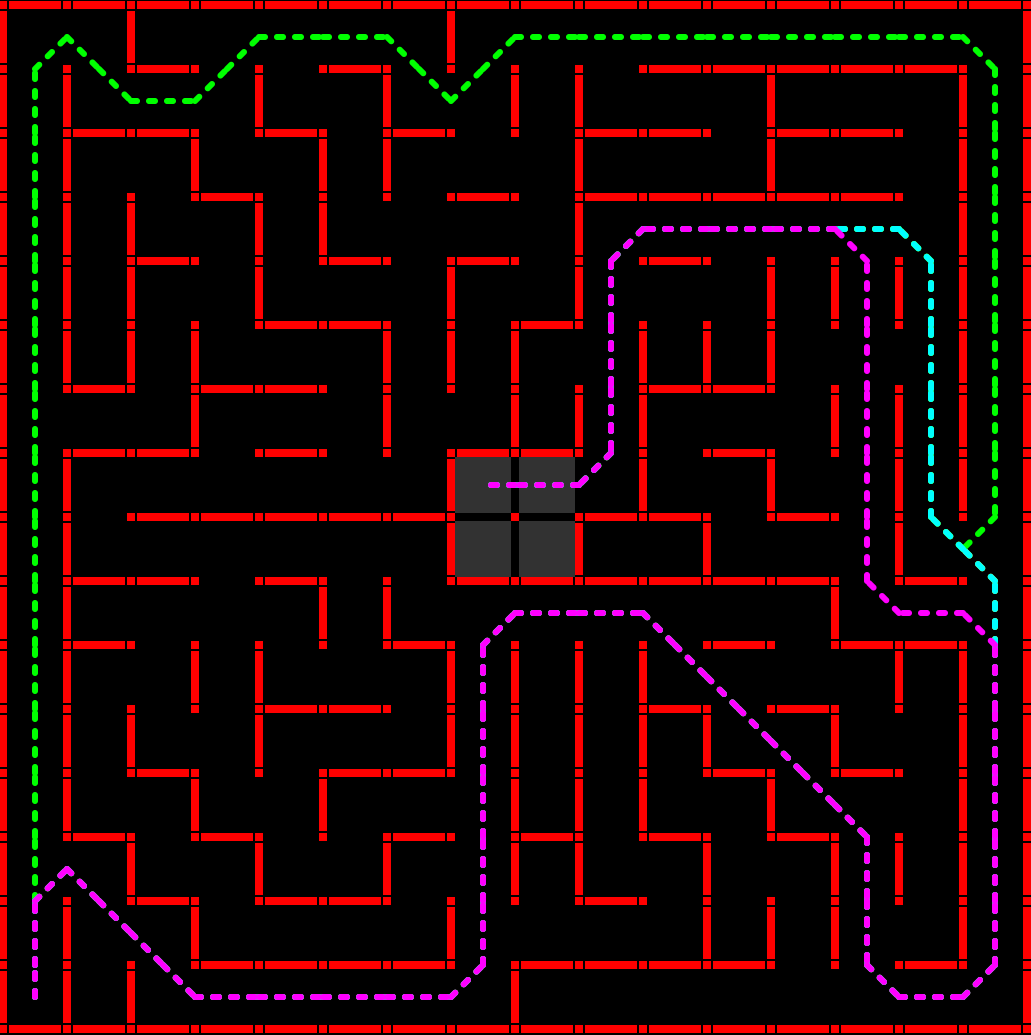
Fortunately for me, the search parameter and first fast run speed that I used worked out well for me.
| Mouse Name, | Contestant Name, | Score Time S |
|---|---|---|
| Decimus 5A | Peter Harrison | 8.520 |
| ROBO-3 | Yang Liu - WenTing Xu -Liang Liu-Xiaopeng Zhao | 10.580 |
| Fat Cat 3c | Tim Foden | 12.800 |
| ROBO-2 | Xiaopeng Zhao | 20.129 |
| FAB1 | Derek Hall | 22.993 |
| MouseX2 | Derek Hall | 23.133 |
| ROBO-1 | Liang Liu | 23.262 |
| PicOne Turbo | Jim Chidley | 29.945 |
| PicOne | Jim Chidley | 39.270 |
| MouseX | Derek Hall | 50.497 |
| Kaasjager | Coen Roos | 50.943 |
| ChunChu | Suresh Ballina | 64.163 |
D5A was still not the fastest searcher, taking 22.8 seconds, but the first run time was very good at only 5.8 seconds and that made all the difference. ROBO-3, in second place, took twice as long to find the goal and only managed 7.4 seconds on its speed run.
As mentioned previously, all the runs after the first speed run are unlikely to count for much but I should like to point out that D5A put in its most reliable performance ever and managed 5 speed runs without having the tyres cleaned. The fastest of these was 4.1 seconds. At that point, I lost my nerve and picked it up to clean the tyres. It then went on to get the time down to 3.78 seconds. I could not be happier with how well the mouse went. In terms of strategy though, I could clearly have been more aggressive since the mouse had the potential to get a score of around 6.5 seconds. Not to worry – first place is good.
Quite possible, with a little more tuning on the day and a better grasp of the rules, the Chinese mice could have done better. Maybe next time.
Senior Micromouse Competition Report 2018
As well as the school pupils, a number of ‘senior’ entries took part in the same events. Here are their results. In case you wondered, in each event, the winner in the schools contest was faster than the winer in the senior event. Come on, folk! Surely we can do better than that.
WALL FOLLOWER
There were only three entrants this year: Ian Butterworth’s “Asymouse”, Ian Buxton’s “VitCee” and Bernard Grabowski’s “Orange”. Two of the mice failed to reach the target cell leaving “Orange” to collect the magnificent brass cheese trophy donated by Alan Dibley. The same maze configuration was used for both senior and junior events and, as has become the norm, the fastest senior wall follower time was beaten by five of the juniors in their earlier event.
1st Place: “Orange”, Bernard Grabowski. (20.07 seconds)
LINE FOLLOWER
There were 5 mice competing in this event with another brass cheese trophy up for grabs for the first time in this event. It was a very close competition. The eventual winner, Ian Buxton, a teacher at Beaconsfield High School, was making his micromouse debut with his mouse “VitCee”. His time was fast but not as fast as six of the juniors, three of whom were from his own school!
1st Place: “VitCee”, Ian Buxton. (11.993 seconds)
2nd Place: “Freddy”, Helen Manners. (12.224 seconds)
3rd Place: “Castor”, Gustavo Lara/Gerardo Gomez. (12.656 seconds)
4th Place: “Asymouse”, Ian Butterworth. (14.221 seconds)
DRAG RACE
This was the first time a senior drag race event had been held at TechFest. It attracted an entry of 5 mice including the first female senior entrant at a UK micromouse contest anyone can remember in recent years Mrs Manners, a science teacher from Beaconsfield High School. The old adage that in this event a slower reliable mouse is more likely to win than a flaky faster mouse held true. The qualifying time of Bernard Grabowski’s “Missile” at 1.901 seconds was the fastest posted but it failed to record a legal time thereafter. The winner of the knock-out competition was Ian Buxton’s “VitCee”. Ian completed a debut double having already won the line follower event.
1st Place: “VitCee”, Ian Buxton (2.387 seconds)
2nd Place: “Freddy”, Helen Manners
3rd Place: “Asymouse”, Ian Butterworth
Finally I want to thank all those involved in hosting, setting up and organising the event.
Was there anything noteworthy done by the Chinese entrants to prep the maze surface so nicely?
I did not see it done but usually it involves running over the entire maze with lint rollers. In this case, adhesive tape inside out.
Thanks for everybody for the event. Unfortunately we were not able to stay to see the finals, but we were able to see the heats and the mice at work. Enough to have me sort through my micromouse bits at home on the Sunday, maybe for an appearance at Hazlemere!!!