Once all the parts have been chosen and the schematics drawn, it is just a case of getting on with building the bits…
Once all the parts have been chosen and the schematics drawn, it is just a case of getting on with building the bits…
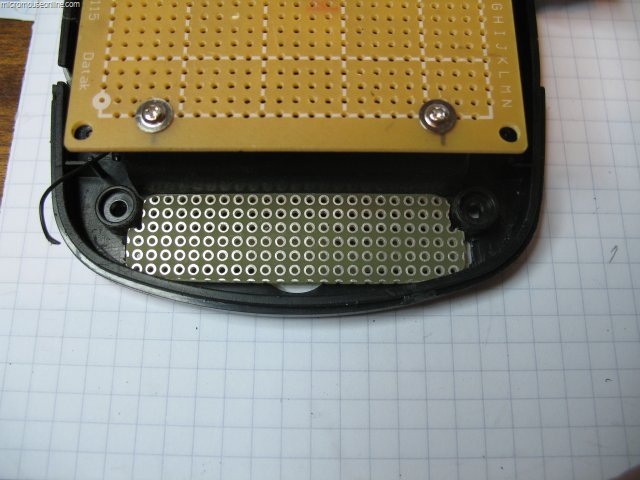
Since the circuit is very simple, most it went onto a cheap bit of single-sided perfboard and is hand wired. Components live on both sides as convenient. The only constraint is that nothing be too tall to fit under the body so some bits are bent over to make room. After all, we don’t want to go racing naked do we. The dangly bits in the picture are a single push button to allow for a dignified and controlled start-stop and a single red LED so that we can see if it is all alive. There was already space underneath for a slide switch so that it can all be turned off when not in use.
The PicKit2 programmer needs a six pin header for programming so that will need the lid off. However, as the PicKit can do serial comms through two of the pins normally used for programming, I may add a software UART to the code and a 3.5mm stereo socket at the back which would allow me to communicate with the robot whit the lid on. This will be good for testing and to download new calibration or controller values.
Sensors are mounted on a small daughter board shaped to fit into the space at the front of the chassis. A slot cut into the chassis allows the sensors to poke through and see the ground. the original caster wheel would have been in the way here so it was replaced with an upholstery nail glued to the battery cover. A spacer under the nail ensures that the sensors are about 3mm from the track. With the wheels at the rear, there will be no rocking and the sensor height will remain constant. My only concern it that with the robot tracking the line so well, it will eventually wear a line down the middle of the white stripe. OK, so perhaps it won’t – it does in my mind’s eye though – ever the optimist.