 It is said that the English are obsessed with the weather. That may be so but you should know that MINOS11 took place on a beautiful spring weekend. This annual gathering of the micromouse community at Royal Holloway near London is looked forward to my many was enjoyed by all who attended.
It is said that the English are obsessed with the weather. That may be so but you should know that MINOS11 took place on a beautiful spring weekend. This annual gathering of the micromouse community at Royal Holloway near London is looked forward to my many was enjoyed by all who attended.
Actually, I suspect the attendees represent but a fraction of the micromouse activity in the UK but, for some reason, a good number of mouse builders choose to keep to themselves and many do not even enter the UK contest in June. Well, the opportunity is there and they miss the chance to share with like-minded enthusiasts from all over the UK. And The USA since David Otten once again took time out to fly across from Boston to update us with the latest news on his micromouse.
This year, we had a busier than usual schedule but managed to get through it in time. Here is a brief summary of each presentation and, where available, a link to any slides or other material made available by the presenter. The Sunday contest update follows further down the page.
MITEE 13 and Accelerometer Control – David Otten
Dave’s latest mouse has specifications carries two, three-axis accelerometers in addition to the usual complement of wall sensors and a gyro. By mounting the accelerometers in such a way as to cancel out effects due to rotation about the major axes of the mouse, Dave hopes to be able to eliminate some of the unwanted signals that appear whenever accelerometers are used. The goal is to provide a means of measuring the motion of the mouse that does not rely upon the wheel encoders. Accelerometers are classically difficult to get good signals from because of the noise present in the sensor. Early results are encouraging although there are some as yet unexplained differences in the data from the sensor pairs. Other improvements in MITEE 13 include a lower centre of mass and changes to the wall sensor configuration to improve signal-to-noise and linearity.
Gyros – Peter Harrison
No self-respecting mouse runs without a gyro these days so, in search of some much needed self-respect; Peter Harrison has been doing some gyro experiments. While simple enough in principle, modern gyros have a number of ‘features’ that must be taken into account when they are used. The current type of MEMS gyro has become very cheap and easy to use although supplies can be somewhat sporadic. Choosing a gyro now is mostly a question of selecting a suitable sensitivity and supply voltage range. In use, the noise inherent in the gyro output manifests itself mostly when trying to keep track of the angle of a turn. The output signal is proportional to the rate of turn and has a small amount of noise present. Integrating this signal give the angle but, since the value has been quantised by the ADC on the processor, cumulative errors can develop quite quickly. Other than that, integration is a very good noise reduction technique equivalent to an infinite sample averager
 Slides
Slides
A Quick Guide to CAD – Martin Barratt
Martin has many years experience as a professional electronics engineer and, in this presentation, he shared some of that experience in relation to making printed circuit boards. While few people would contemplate laying out a schematic and/or PCB without some CAD tools, Martin explained why such packages do not necessarily produce ‘good’ results automatically. In particular, he examined the issues of designing package outlines. Most ECAD tools come with libraries for many parts. The novice would be very tempted to use them as supplied but the quality of these ‘free’ libraries can be very suspect. The best option is to build your own library of parts that you can verify directly. A recurring problem is that of grid sizes. Parts are specified with either metric or imperial dimensions. Often, where both sets of dimensions are given, one is simply a numerical conversion of the other. Martin give excellent guidance on creating parts to a common set of measurements to make laying out, routing and manufacture of PCBs much more reliable.
Slides
Datalogging on the Move – Tony Wilcox
It is all very well building robot and then watching them to see if they are behaving but, if you want to know what they are really doing, you will need to get real data from the control system. It would be nice to be able to use remote telemetry but there are some problems. First, there is the question of bandwidth. Even a good serial link might manage no more than 115kbaud. That would be enough to send about 8 bytes every millisecond – not enough to record more than the sensor data. A clever buffered serial subsystem would also be needed if the mouse were not to be bogged down in just sending the data. Second, there are real problems when you have several devices sharing the same bandwidth. Either there are channel management problems or the shared bandwidth restricts data rates. On-board recording is much easier to manage. In this presentation, Tony discusses some techniques for using high speed, large capacity FRAM devices for data logging. Also available are some actual data samples from his mice and sample source code for using the devices.
Slides
Datalogging on the dsPIC – David Hannaford
David too has a need to record data on his mouse. He uses the dsPIC processor which has only enough RAM for 8k words of storage. After using some for system variable, there is only about 5000 words left for logging. Enough for about a seconds worth of simple data and that can sometimes be enough. David’s technique allows him to specify, in a single location, which data items he wants to record. A common logging function uses that set of configuration flags to decide what to record. At the end of a run, data is uploaded to the PC over a serial cable. That data is simply formatted into fixed width ascii characters so that it can be stored in a file for post-processing or to allow imports directly into Excel for graphing. Detailed information of how this is done is included in the presentation along with some sample records that show how such a technique can reveal problems that would otherwise remain forever hidden. The slides also include sample code to manage all this in dsPIC assembler.
Slides
Amicus 18 – moving on from the Picaxe – Bernard Grabowski
Bernard has been a user of the BASIC programming language for some time. In spite of all the new-fangled languages and environments, BASIC retains its appeal as an easy to use and understand general purpose programming language. It is available on pretty much any platform you care to name and can easily be extended for use on microcontroller systems. Until now, Bernard has favoured the PICAXE system. These are relatively inexpensive, come with an easy to use development environment and can download semi-compiled code straight to suitably pre-programmed chips. The devices used are PICs and the code runs in an interpreter. The language contains many enhancements to make it very useful for robotics projects. Recently however, Bernard has found the PICAXE to be a little restrictive. In particular, the interpreter is not very quick. Searching around for an alternative, he found the AMICUS. This is similar in all respects to the PICAXE except that the code is compiled on the PC and can be downloaded to the processor and run at native speeds – up to 30 time faster. Furthermore, the AMICUS system has adopted the ubiquitous Arduino footprint for its boards so that many popular Arduino add-ons should work with it.
Slides
Schools STEM robots – Garry Bulmer
Over the last couple of years, Garry Bulmer has put a lot of effort into working with a number of projects designed to encourage and improve the creation of technology in schools and other communities. Robotics is often the means by which interest is raised but it is means rather than the end. Processing power is generally centred around the Arduino for its ease of use and ready availability. Several courses have been run – inspired by the work of the Imagineering Web in Leamington Spa – reaching more than 120 people in the last year. The latest project is a general purpose STM32 board, the Orone. Garry issued a call for help from anyone interested in developing this and related projects. There is clear demand in schools and among other groups. Get in touch today.
Surface Mount manufacture – Garry Bulmer
Surface mount technology is pretty much the norm in all kinds of products. SMD components are plentiful and cheap. In fact, fro many devices, there is no through-hole version. At first sight, constructing circuits with these tiny parts may seem difficult, requiring the eyesight of a hawk, the dexterity of a neurosurgeon and the patience of a zen master. It turn out that only the eyesight is needed and that is easily achieved with a simple desktop magnifier. Very simple tools can be used to reliably solder quite complex circuits with remarkably tiny components. Key to success is a simple toaster oven worth about £20. Garry demonstrated how it takes only a few minutes and a small amount of solder paste to produce really very good results. A quick google search for terms like smd ‘toaster oven’ will find you all the information you can use.
Contest Report – Peter Harrison
Peter Harrison, who had the great fortune to be able to attend both events, gave the annual feedback for contests held in Japan and the US. Rather than go into great detail about the results and replaying the various bits of video for the 2010 all Japan micromouse contest, a more detailed look was taken at a number of interesting mice. Perhaps most notable among these was certainly the most sophisticated. A vision-guided mouse ran in the contest maze. A clever system of mirrors allowed a single camera to see five views of the surrounding cell. Processing power was provided by two, 32 bit processors built into a FPGA device that ran the beast. Compared to the sophistication of the vision processing, the chassis was a model of simplicity with a tricycle arrangement driven with a single motor and differential at the rear. Steering was through a custom-made servo and the odometry appeared to be based around the scroll wheel of a desktop computer mouse. From a Japanese perspective, the crowning glory of the contest was to have Kato take the championship. This well-deserved victory brought the contest win back to Japan after a long period of Singaporean dominance.
Slides
A new type of Optical Distance Sensor – Ken Hewitt
There are any number of ways to measure the distance to the walls in a micromouse. Assuming you do not have the ability to make a vision-guided mouse and you cannot solve the geometry of the PSD-based sensors used by Dave Otten and Harjit Singh, you come up against a number of problems when designing sensors. Chief among these is that simple sensors rely upon the apparent brightness of the walls as a measure of distance. Since walls from the same batch can vary in brightness by 10% or more, the sensing problem can be difficult. Ken Hewitt recently came across a linear sensor array that looked ideal to implement a kind of sensor he first encountered many years ago. In the presentation, you will find sample outputs from this sensor where the distance to a black wall and a white wall are compared. The sensor gives a very clear and accurate indication of distance in spite of the visually huge different in the reflected light.
Slides
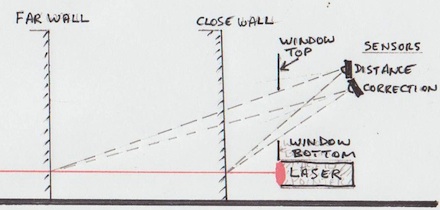
Another Distance Sensing technique – Alan Dibley
Alan ‘s experience with micromouse goes back a good way. One of the pioneers, he is a great believer in simplicity. When it comes to wall sensors, he feels he would do without lots of calculation but would still like to be able to overcome the problem of wall reflectivity. His solution is to use two detectors and to make use of their polar response curves to measure distance. These detectors will be mounted further from the emitter axis than is normal One sensor is arranged so that it has its peak response when the spot of light from the emitter falls on the wall at the furthest anticipated distance. As the distance to the wall decreases, the response would tend to fall off as a result of the spot being further away from the axis of the detector. A second detector is positioned closer to the emitter axis such that its response is more constant by pointing it inwards toward the emitter axis a bit more. This reference sensor tells you how much light is available from the wall and the first, distance sensor tells you how much of that light is a result of position. By comparing the reference sensor with the position sensor, it should be possible to indicate range without the reflectivity of the walls having a great effect.
AVR ADC Gotchas – Duncan Louttit
Extensive experience with the AVR processors does not mean you can claim to know all there is about a device. There is always the opportunity for some new and unexpected issue to arise. Duncan have been a fan of the AVR processor for a good while. In his presentation, he shared two recent cases where a subtle reading of the manual was needed to explain some peculiar behaviours associated with the ADC peripheral found on AVR chips. The first case demonstrated that the sample time is indeterminate unless care is taken to reset the ADC clock at each sample. The requirement was to sample at a fixed and critical time after an event. Since the ADC clock is normally free running, the result shows significant jitter. This information was in the manula but was not immediately apparent. In the second case, gate capacitance in a FET driven by the chip was large enough that the charge it held could discharge back though the chip in such a way as to reset the ADC peripheral. A series resistor between the chip and the gate ensured that any discharge was more modest and the problem disappeared. That information was not in the manual.
Sunday Contest
After our customary meal and late night session, we all assembled to build a maze and run a short contest. Here is the finals maze:
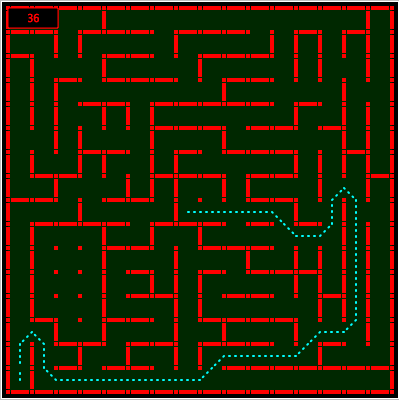
(The binary maze file is here)
As ever, Dave Otten showed us all how it is done with a characteristically smooth run from MITEE12 over the 36 cell path. Derek hall’s MouseX looked like it would provide some stiff competition but issues with the timing arrangement meant that we could be certain of its best time. The timing issue was about the mouse starting a speed run immediately without pausing in the start square. This didn’t leave the timing person the opportunity to re-arm the system. In spite of a reasonable show in the heats, Decimus 2 failed to run after a catastrophic software error between the contests. When attempting to update the steering constants for the final, the chip would not program correctly, After a couple of tries, an older version of the software was left in the device and Decimus 2 was not able to even explore. Tim Foden’s Fat Cat looks greatly improved since its last public outing and should perform well in the summer contest. Although not a complex maze, it seemed good enough to confuse several of the contestants with more than half the entrants failing to get a run time.
|
Handler
|
Wall Follower
|
Heat time
|
Best
|
|
David Hannaford
|
Mouse 7 WF(NC)
|
65.772
|
83.731
|
|
Ken Hewitt
|
Lefty WF(NC)
|
49.826
|
58.466
|
|
Bernard Grabowski
|
WHS WF (NC)
|
44.701
|
55.522
|
|
Chloe Hall
|
Snoopy WF (C)
|
31.232
|
43.98
|
|
Handler
|
Maze Solver
|
Heat time
|
Best
|
Run 1
|
Run 2
|
Run 3
|
Run 4
|
Run 5
|
Run 6
|
|
Jim Chidley
|
Mouse Bot
|
FTC
|
FTC
|
|
|
|
|
|
|
|
Alan Dibly
|
THEZEUS C
|
FTC
|
FTC
|
|
|
|
|
|
|
|
Derek Hall
|
X2
|
FTC
|
FTC
|
|
|
|
|
|
|
|
David Hannaford
|
Mouse 7M
|
FTC
|
FTC
|
|
|
|
|
|
|
|
Jim Chidley
|
PIC one turbo A
|
FTC
|
FTC
|
|
|
|
|
|
|
|
Peter Harrison
|
DECIMUS II
|
19.266
|
FTC
|
|
|
|
|
|
|
|
Martin Barratt
|
ISAMBARD II
|
104.345
|
72.827
|
72.827
|
|
|
|
|
|
|
Jim Chidley
|
PIC one turbo B
|
74.366
|
13.992
|
79.812
|
13.992
|
|
|
|
|
|
Tim Foden
|
FAT CAT
|
25.012
|
13.78
|
65.822
|
14.497
|
13.78
|
15.765
|
|
|
|
Derek Hall
|
Mouse X
|
43.234
|
6.696
|
30.814
|
6.696
|
|
|
|
|
|
David Otten
|
MITEE MOUSE 12
|
10.093
|
5.992
|
109.455
|
8.183
|
7.422
|
6.81
|
6.371
|
5.992
|



Thank you to all those who took the time to prepare and present stuff for the rest of us. And thans also to Adrian Jonstone for making it possible to use Royal Holloway as a venue and Janet Hales for looking after the administration of the event.