I missed discussing a couple of items in the last post: How are we going to attach the motor/axle brackets to the board and how do we handle the gap between the hub/gear and the bracket. Our original thought was to reduce mechanical complexity of the bracket, we wanted to support having axles that go between both brackets on the mouse.
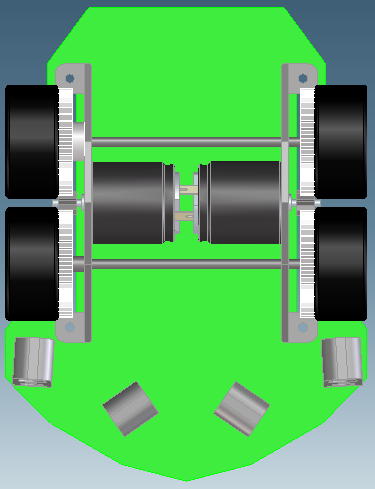
This gives the mouse some torsional rigidity since we have a big cut out in the board and the board is 0.8mm (0.031”) thick. During the PCB layout, it became clear that the axles would push the batteries further out. This then pushed connectors and the four character LED further out. So, Pierre and I decided that the axles would not go across and instead we would use half-shafts. To make the half shafts more robust, we wanted material in the bracket for them to attach to. So, to eliminate one machining step, we decided that the ears to mount the brackets to the PCB would be on the same side as the half shafts and that way Pierre can machine the half shaft mount directly into the bracket. Since this is a four wheel mouse, the bracket is really long and the mounting ears have to reach around the cut out in the board. This actually helped reduce routing constraints around the cutouts but it also meant that if we wanted to try different gear ratios or wheel/tire diameters, our choice would be limited. Compromises, compromises, compromises…
If you look at the photo below, the bottom left of the left bracket shows how we would capture the half shaft and if we wanted to use an axle, that we need a small spacer. The upper left shows how, if we had used an axle, we could have grown the hub/gear assembly to come all the way to the bracket.
Now that I have the mechanical design done, I started focusing on the electrical design. ZV uses a four layer circuit board which pays attention current return paths, has multiple dedicated voltage regulators and high precision voltage references for minimizing the noise for the sensors. Given the space limitations, I decided to use LC filters instead of dedicated voltage regulators/references. I really struggled with whether I should include a beeper and four character display or not because of the space they take. In the end, I decided to include them. I haven’t really been able to use these two very effectively so far and if I don’t soon figure it out for ZV and ZVI, I’ll be removing them.
The benefit of using the smaller 64pin QFP for the STM32 is that it reduces the amount of support components i.e. Rs and Cs. I thought about changing the JTAG port to the single wire implementation but decided to stick with the five wire soln. that I use on ZV so that I can continue to use the same debug HW for both ZV and ZVI. Since I wanted to be aggressive about reducing the number of capacitors, I spent some time looking at high value ceramic capacitors. One item that was surprising was that if you bias them at “high” voltages, the capacitance drops quite dramatically. For example, a 10uF, 6.3V ceramic cap’s actual capacitance when used on a 5V rail is only 2uF! I found that I was better off using a 4.7F, 10V ceramic cap. because it would be 3.2uF across a 5V rail. I think a better bet would be a tantalum capacitor. I decided to use ceramic capacitors even though they have a lower capacitance because they have lower ESR.
As I was placing the parts, I took a close look at the connectivity and it became pretty obvious that I could do the layout in two layers, instead of four, and not (hopefully) sacrifice any noise performance. I went ahead and did the placement and layout with this in mind and besides a few routing congestion issues, didn’t run into any problems. I ended up placing all parts on the top layer and using the bottom primarily as a ground layer. When I get the board back, I’ll know if I succeeded in achieving the same level of noise on ZVI, a two layer board, as ZV, a four layer board.
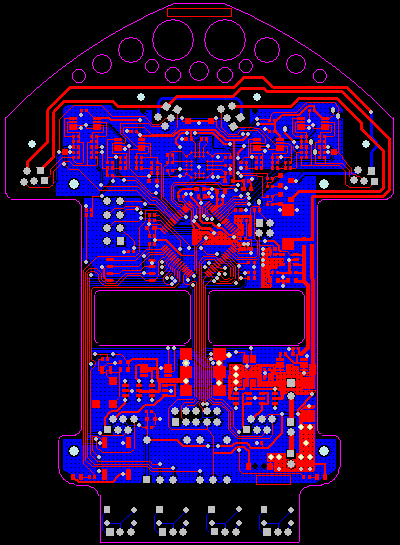
To make the board easy to produce, I use 0.2mm traces with 0.2mm space, vias with 0.3048mm hole and 0.6096mm diameter. When it came time to order the board, I sent the files to many different board vendors and their response is shown in the table at the bottom of this post. Some prices were received by email and some were generated by their web based costing tool.
After doing some internet searches, I decided to order the board from PCB Cart. I know of a competitor who uses OurPCB. Please note, I’m not associated with any vendor and I’m not recommending any of them either. Please do your own research to determine who you want to use.
Here is a picture of the board – the red is the top layer and blue is bottom layer. The bottom of the board shows four sensor boards that I added to the bottom so that I wouldn’t have to order another board. I’ll cut them off myself. The actual bottom follows the blue ground pour. I’ll post pictures when I get the boards back.
|
Who
|
Addr
|
Qty
|
Price
($) |
Setup
($) |
Ship
($) |
Total ($)
|
Time
|
Testing
|
Comment
|
| San Francisco Circuits | www.sfcircuits.com |
10
|
500.00
|
5d
|
Y | Made in USA | |||
|
Accutrace
|
5
|
44.46
|
100.00
|
322.30
|
1wk
|
5 additional @ $3.80 each
|
|||
|
Advanced Circuits
|
Quote request submitted
|
||||||||
|
PCB Fabexpress
|
455.00
|
Quote request submitted TRN-4007 Est.
|
|||||||
|
SpeedyPCB
|
5
|
25.60
|
–
|
29.00
|
157.00
|
5d/6d
|
Y
|
5 additional @ $2 each
|
|
|
OurPCB
|
5
|
1.91
|
80.00
|
30.00
|
119.55
|
7d
|
Y
|
Email quote received
|
|
|
PCBCart
|
5
|
10.73
|
64.24
|
26.73
|
117.89
|
8d
|
Y
|
Online, does not include shipping
|
|
|
PCBCart
|
10
|
6.31
|
64.24
|
26.73
|
127.34
|
8d
|
Y
|
Online
|
|
|
CustomPCB
|
9
|
4.79
|
105.00
|
15.50
|
163.61
|
2w
|
Online – also called Silver Circuit
|
||
|
GoldPhoenix
|
13
|
180.00
|
6d
|
Email quote received
|
|||||
|
PCBNet
|
5
|
40.25
|
100.00
|
301.25
|
1wk
|
5 additional @ $3.45 each; same as accutrace.com?
|
|||
|
PCBOrder
|
5
|
114.75
|
100.00
|
673.77
|
5d
|
5 additional @ 0; same as accutrace.com
|
|||
|
PCB4less
|
5
|
RFQ
|
|||||||
|
Finecircuits
|
5
|
20.00
|
75.00
|
175.00
|
1w
|
95.00
|
Online
|
||
|
Sunstone
|
5
|
145.80
|
728.98
|
Online, same as pcbexpress.com
|
|||||
|
Protoexpress
|
5
|
72.31
|
Free?
|
361.55
|
1w
|
85.00
|
Web PCB quote
|
||
|
Protoexpress
|
10
|
361.55
|
1w
|
Y
|
Email quote received
|
0402 parts! I can barely see them these days let alone mount them.
How will you mount/solder the gyro?
Jesse, a technician at work, has come up with a really nice recipe for attaching the ADXRS610 gyro from Analog Devices.
1) Use a solder iron and add (yes add) SnPb solder to the balls on the gyro.
2) Use solder wick and remove all the solderballs from the gyro.
The reason for steps 1 and 2 is that the solderballs are lead free and have a liquidus temperature of around 220C Vs 183C for SnPb solder. The original higher temp. solderballs make attaching the gyro difficult. By doing these steps, we remove the original solderballs and replace them with lower temperature SnPb solderballs.
3) Now use SnPb solder and flow the solder over every pad on the gyro. This will result in creating SnPb balls on the gyro.
4) Now clean and pre-tin the pads on the board.
5) Apply some solder flux to the board and position the gyro over the pad.
6) Heat up the gyro and the bottom of the board using two heat guns.
7) In some amount of time, you will see the gyro float and then align itself.
8) Clean up the solder paste and check joints.
I’ll ask Jesse if he is game for taking pictures of the process and perhaps writing this up.
I think Nakashima-san or another competitor, puts vias in every pad and then flows fresh solder through the via to attach the gyro.
I can concur lead free solder is awful to use. it is pastey and has no surface tension and wont pull a part into position like lead solder will. So im very happy to see this method. the gyro mentioned has many nc pads also . i inverted mine and soldered 0.100mm enamled wire to the (ball pads) . this method i have usd for several 0.5mm pitch parts, if you have a accelerometer or gyro with 0.5mm pitch I2C or SPI you can invert and make your own breakout board on vero under a 10x stereo microscope . I would warn about board warping when heating the pcb from beneath it can cause local bulging . but then who can afford two heat guns ! :>}
If possible practice on a spare pcb first, I have soldered many bga’s with a heat gun only, (replacing parts, never new) my method is to clean the pads with the flux pen, make sure all pads have no residue. flux the part also. position in the same way other parts are positioned in relation to silk screen
The silk screen can be different on every pcb. warm with heat gun from 2″ at least otherwise you will blow the part off the board when the flux smokes move the nozel to 3-4mm and heat for 20 sec.with lead free when you think its too hot its just right. this usually works for lead free BGA DDR memory chips,
a note on 0402 vs 0603, i find it very hard to change 0402 , the heat doesnt move through the part and you cant unsolder both ends easily, they are ok for mobile phones but i wouldnt use them in any system i needed to work on.
Where are you getting your gears? Both the ones to mount on the wheels as well as the ones to be used as pinions
Some potential sources for the pinion:
http://www.rchobbyhelicopter.com/store52/agora.cgi?product=Pinion_Upgrades
http://www.cmehobbies.com/ProductDetails.asp?ProductCode=bp8t15mm&CartID=1
http://www.gizmoszone.com/shopping/agora.cgi?product=Motor_gear&user4=D-Shape_Hole;ppinc=1b
For the spur gear, I would look at Stock Drive Products. Alternatively, you could look at Mini-Z hubs and gears.
I already have almost all the pieces to build the mouse (gyros, drivers,motor,micro controller, mini z rims and tires, bearings, etc) but the hardest part has been finding a set of pinion and spur gear combo that mesh and are the right ratio and dimension. All your help is much appreciated. Ideally I want a 60:15 ration but it seems like I’m going to have to deal with a 48:12 ratio. Any thoughts on this? And could you relate more on this mini z hubs and gears. I’ve looked into countless mini z options. One again thanks for all the help! 🙂
If the 48:12 ratio meets your motor center to axle center distance and is the 48 tooth gear is smaller than your wheel/tire OD, then I think you should be fine. Another thing to make sure is that your motor doesn’t hit the axle with this ratio.
I have not looked at mini-z hubs or gears. I’ve seen competitors at the All Japan contest use them.
I am considering purchasing a hob to cut my own custom gears to any size I want. I was wondering if you would recommend a modular size. I was thinking of getting a .5 mod hob. Would you recommend me getting something else ?
Thank you for all your help
0.5 mod is a popular size. I ordered a hob from: http://www.arceurotrade.co.uk/catalogue/results.aspx?search=hob
Regards,
Pierre
i agree with you @”peteh”.
How can i mount/solder the gyro? Harjit Singh how can i do that
replay fast .
http://www.technotronix.us/
Hi Harjit Singh,Have you investigated http://www.wellpcb.com ? Do you know how about this pcb vendor?