APEC is done. Once again, I boarded a plane to the United States to brave the trials and tribulations of a long weekend suffering in the warm sunshine of Florida. It is tough going compared to my normal climate in Anglesey but we must all suffer for our art. And I managed third place. My best result ever.

The thirty-first annual APEC MicroMouse Contest was held at the Tampa Convention Center in Tampa Florida on March 27th, 2017. A total of 12 mice were on hand for the contest, including 6 foreign entries. Diu-Gow 4 from Lunghwa University of Science and Technology in Taiwan came in first with the best score as well as the Fastest Run, and also won the Best Student award. Hippo C from Lunghwa University of Science and Technology in Taiwan came in second. Decimus 5α came in third. All the contestants are listed in the table below together with their best score.
|
Mouse Name
|
Affiliation
|
Country
|
Score
|
|
Diu-Gow 4
|
Lunghwa University of Science and Technology
|
Taiwan
|
9.442
|
|
Hippo C
|
Lunghwa University of Science and Technology
|
Taiwan
|
11.931
|
|
Decimus 5α
|
Peter Harrison
|
UK
|
15.008
|
|
Green Giant 5.19V
|
Cal State, Los Angeles
|
United States
|
17.917
|
|
Zeetah VI
|
Harjit Singh, Pierre Hollis
|
United States
|
20.157
|
|
EduMouse
|
Lunghwa University of Science and Technology
|
Taiwan
|
20.180
|
|
Exia Repair II
|
Naoto Hiramatsu
|
Japan
|
52.097
|
|
Patience 1C
|
Robert Scheer
|
United States
|
60.960
|
|
Brain
|
University of Pittsburgh
|
United States
|
105.201
|
|
Jerry
|
University of Texas in El Paso
|
United States
|
|
|
Deceptimouse
|
University of Texas in El Paso
|
United States
|
|
|
Fab 1
|
Derek Hall, Jim Chidley
|
UK
|
Cash prizes were awarded again this year. Diu-Gow 4 received US$500 for first place, US$500 for the best student entry, and US$150 for the fastest run. Hippo C received US$250 for second place. Decimus 5α received US$125 for third place.
Scores for All Completed Runs of each Mouse
| Mouse Name | Run No | Run Time | Maze Time | Penalty | Score |
| Diu-Gow 4 | 1 | 25.916 | 0 | 0 | 25.916 |
| Diu-Gow 4 | 2 | 7.405 | 61.100 | 0 | 9.441 |
| Diu-Gow 4 | 3 | 6.535 | 103.360 | 2 | 11.980 |
| Diu-Gow 4 | 4 | 6.218 | 142.796 | 2 | 12.978 |
| Hippo C | 1 | 43.863 | 0 | 0 | 43.863 |
| Hippo C | 2 | 9.642 | 68.662 | 0 | 11.930 |
| Hippo C | 3 | 6.648 | 119.367 | 2 | 12.626 |
| Hippo C | 4 | 6.412 | 165.473 | 2 | 13.927 |
| Decimus 5α | 1 | 35.645 | 0 | 0 | 35.645 |
| Decimus 5α | 3 | 9.287 | 111.621 | 2 | 15.007 |
| Decimus 5α | 4 | 8.890 | 158.722 | 2 | 16.180 |
| Green Giant 5.19V | 1 | 23.972 | 0 | 0 | 23.972 |
| Green Giant 5.19V | 5 | 11.013 | 147.116 | 2 | 17.916 |
| Zeetah VI | 1 | 50.978 | 0 | 0 | 50.978 |
| Zeetah VI | 3 | 13.894 | 127.903 | 2 | 20.157 |
| EduMouse | 1 | 80.849 | 0 | 0 | 80.849 |
| EduMouse | 2 | 15.914 | 127.978 | 0 | 20.179 |
| EduMouse | 3 | 15.605 | 206.508 | 2 | 24.488 |
| EduMouse | 4 | 15.077 | 272.333 | 2 | 26.154 |
| EduMouse | 5 | 11.888 | 342.952 | 2 | 25.320 |
| Exia Repair II | 1 | 52.097 | 0 | 0 | 52.097 |
| Patience 1C | 1 | 87.534 | 0 | 0 | 87.534 |
| Patience 1C | 2 | 53.601 | 160.765 | 2 | 60.959 |
| Brain | 1 | 111.871 | 0 | 0 | 111.871 |
| Brain | 3 | 96.307 | 206.824 | 2 | 105.201 |
The contest was held on Monday night after the exposition so that everyone at the conference could attend. New this year, stadium seating to handle about 200 attendees was located on either side of the maze. The traditional aerial view of the maze was projected on a large screen behind the judge’s table. The scoring system superimposed the timing information on the overhead view of the maze, so that everyone could see it in real time. The contest venue was located in the exhibit hall very near to the exhibits, making it easy for attendees to migrate over to the contest when the exhibits closed. The picture below shows the venue as the contest was just getting under way. The contest was run on a maze imported from Korea.
Gerardo Molina prepared the maze design once again. APEC has developed a reputation for very difficult and long maze designs. This year’s design had two main paths to the center. The green path plus the red path was 108 squares. Most mice took this path. The green path plus the blue path was 109 squares. Two mice took this path, including the winner.
Diu-Gow 4 was designed and built by Xin-Han Cai in 2015. He is currently a graduate student at Lunghwa University of Science and Technology in Taiwan, working on a master’s degree. Diu-Gow 4 is equipped with a vacuum fan, made by a 3D printer, to prevent skidding in high-speed turns. Because of the vacuum fan, Diu-Gow 4 turns about 25 percent faster than his previous micromouse Diu-Gow. Diu- Gow 4 won first place in the All Japan micromouse contest in 2015, 2016. Jiu-Hung Hung is a partner of Xin-Han Cai.
Hippo C was designed and built by Huan-Jie Liao in 2016. He is currently a graduate student at Lunghwa University of Science and Technology. Hippo C is equipped with a vacuum fan to increase friction while turning. The fan and fan body were made by a CNC machine. A boost switching power circuit is used to provide a stable voltage input to the DC motors. Yu-Chih Lin is a partner of Huan-Jie Liao. Hippo C came in second at the APEC micromouse contest in 2016.
Technical information for the Lunghwa University of Science and Technology entries
| Diu-Gow 4 | HIPPO C | EduMouse | |
| Length/Width | 105mm/79mm | 99.6mm/79mm | 100mm/89mm |
| Height/Weight | 40 mm/ 100g | 31.14 mm/ 110g | 24mm/~110g |
| Drive Motor | 1717T006SR + IE2-512 x 2
Vacuum motor : Maxon RE8 |
1717T006SR + IE2-512 x 2
Vacuum motor : Maxon RE8 |
JD20-L002A229-1 x 2 |
| Tire size | Diameter : 21.5mm, Width : 9mm | Diameter : 21.5mm, Width : 9mm | Diameter : 24mm, Width : 9mm |
| Gear ratio | 60:16 | 60:16 | 45:9 |
| CPU | Renesas RX62T | Renesas RX62T | dsPIC 33EPMU806 |
| Flash ROM | 32KB | 32KB | 128KB |
| On chip RAM | 16KB | 16KB | 64KB |
| Wall Sensor | OSRAM SFH4550 x 6
TOSHIBA TPS601A x 6 |
OSRAM SFH4550 x 6
TOSHIBA TPS601A x 6 |
OSRAM SFH4550 x 4
TSL262 x 4 |
| Gyro | Analog Devices ADXRS620
STM LY3100ALH |
Analog Devices ADXRS620 | MPU6500 |
| Top/turn speed | 4.1m/s, 120~200cm/s | 3.8m/s, 120~180cm/s | 1.5m/s, 50cm/s |
| Display | RGB x 2 | RGB x 2 | RGB x 2 |
| Power Source | Lithium Polymer 120mAh2S(7.4V) | Lithium Polymer 120mAh2S(7.4V) | Li-Polymer 240mAh 2S(7.4V) |
Decimus 5α is a classic (full size) micromouse by Peter Harrison from the UK. Using the common four-wheel drive layout, this revision has a top speed in excess of 5m/s. The use of 3D printed parts has greatly simplified the mechanical design and construction of this mouse. Sensor alignment in particular is much easier with IR absorbing, 3D printed mounts. Decimus 5α has demonstrated repeatable turns at nearly 2g of centripetal acceleration and straight-line accelerations of up to 15m/s2. The ARM cortex M4 processor is an STM32F407 with 1Mbyte of flash and 192kbyte RAM. Running at 144MHz, it performs all the navigation, solver and control functions using floating point throughout while still only taking up less than 10% of the available processor power. Improvements to the searching and pathfinder algorithms attempt to find the most effective route by taking into account the mouse dynamics and the need to search as fast as possible. A comprehensive software re-write is under way which, it is hoped, will improve reliability and turning performance as well as paving the way for a port to new hardware.
Green Giant 5.19V (vacuum design) is designed and built by Luzhou Ye (Green Ye) a student at Cal State LA.
Technical information for the Green Giant 5.19V
| Name: Green Giant 5.19V | Designer: Luzhou Ye (Green Ye) | ||
| Dimension:H:37mm W:75mm L:100mm | Weight 116g / Nominal suction force:58.4g/W | ||
| Gear Ratio 60:16 M0.3 / wheel D:22mm W:9mm | Battery: 300mah 45C LiPo 2S1P (7.4V) | ||
| MCU: STM32F405RG at 168MHz with 16MHz internal RC | Memory: MCU built-in 192KB ram and 1MB ROM | ||
| IR Sensor: SFH4550 X 6 + TEFT4300 X 7 | MEMS: MPU-6500 X 1 @ 20Mbps for SPI | ||
| Motor: 1717T006SR with IE2-512 X 2 | Fan Motor: CL-0820-17 X 1 | ||
| Internal Power Regulation: LMZ21701(5V) + TPS73633EP(A3.3V1) + LMZ10501(2V) + MCP1700 X 2 (A3.3V2&Bluetooth) | |||
| UI: HCMS-2903 LED display X 1 + LED x 18 + Button X 2 + Buzzer X 1 + Bluetooth 4.0 (DA14580) | |||
| Fan Power Supply: buck converter to 3.3V, 3A max (TPS82130) | |||
| Motor Power Supply: boost converter to 11.88V, 10A Max (TPS61088) | |||
| Motor Driver: UCC27524 (Driver) X 2 + DMHC3025LSDQ-13 (H-Bridge) X 2 | |||
| Fan Driver: UCC27524 (Driver) X 1 + RF4E070GN (Low Side N-Mosfet Drive) X 2 | |||
| Max Speed: 5m/s | Max Acceleration: 18m/s2 | Max Turn Speed: 1.7m/s(90v) 2.1m/s(90L) 2.0m/s(45) 1.8m/s(135&180) | |
Zeetah VII was designed and built by Pierre Hollis and Harjit Singh. The idea behind this mouse was to see how light we can make it. The mouse weighs in at 44 g. It uses an STM32F411 CPU with 512kB flash and 128kB of RAM, has 16MB of flash for logging, AD22425 analog gyro along with a BMX055 accelerometer/gyro (to compare the gyros), a 128×32 OLED display and 512 count encoders on the wheel. Power comes from two LiPo 70 mAh cells. The motors are MicroMo 1024S. The mouse measures 84mm x 74mm.
EduMouse was designed by Juing-Huei Su and Chao-Wei Chen for educational and experimental purposes. It uses observer-based sensor fusion algorithms to improve the encoder resolutions.
All the Taiwan teams are from the Embedded Control System Laboratory of the Department of Electronic Engineering at Lunghwa University of Science and Technology, which is organized and led by Professor Juing-Huei Su.
Exia Repair II has 6 infrared sensors and a suction fan which is made with a 3D printer. This allows it to be more stable in a fast run. The suction fan can create 270g of force with 50% output. I have not measured it at maximum output. Exia has some new features which it did not have at MM2016 in Japan.
1. It is able to accelerate in known sections of the maze during searching.
2. It has a much faster algorithm to determine the route.
Technical information for Exia Repair II
| Robot Name | Exia Repair II |
| Designer | Naoto Hiramatsu |
| Team Name | Mice Busters |
| Length/Width | 94mm/74mm |
| Height/Weight | 40mm/115g |
| Drive Motor | FAULHABBER 1717-003SR+IEH2-4096 *2 |
| Motor Driver | TB6614FNG |
| Vacuum Motor | MAXON DCX-10S |
| Tire Size | Diameter: 24mm, Width: 8.5mm |
| CPU | Renesas RX631 |
| Gyroscope | Invencense MPU6500 |
Patience 1C is the first micromouse from Robert Scheer. As a newbie, the goals for this project were limited to basic functionality using simplification of fundamentals. Motto for this project is “A little Patience goes a long way.” The format is 2-wheel, classic size. Wheel & motor mounts are CNC milled 7075AL. Fixed wheel shafts are CNC turned 7075AL. Wheel rims are CNC milled Acetal. Wheel bearings are off-the-shelf Acetal gear hubs rotating on aluminum, ie without ball-bearings. Search and speed-run speed is 0.8m/s, while accel/decel is 7m/s2. Turns are limited to left and right 90deg pivot turns.
Technical information for Patience 1C
| Designer | Robert Scheer |
| Dimensions | 76W x 95L x 25H mm |
| Weight | 77g |
| MCU | STM32F405RG @168MHz |
| Gears | 50:12 mod.4 |
| IR | SFH4550/TEFT4300 x4 |
| Motors | Faulhaber 1516T006SR with IEH2-4096 encoders |
| Motor driver | 1x DRV8835 drives both motors |
| Battery | 2S LiPo 150mAh 20C 11g |
| Gyro | LY3200 |
Brain is designed and built by students in the Robotics and Automation Society at the University of Pittsburgh. All components are mounted to a custom-designed PCB measuring 8cm by 10cm. The Brain uses a Teensy 3.2 development board, which includes an ARM Cortex M4 CPU running at 144MHz with 64kB RAM and 256kB flash. A mass of 140g is driven by four independent wheels. For control, the Brain utilizes a gyro, encoders on each motor, and four IR phototransistors. The hardware has demonstrated accelerations and velocities in excess of 12m/s2 and 3m/s, but software control is limited to more modest speeds. The language is C++, and the build system is Teensyduino.
Jerry was designed and built by students at the University of Texas in El Paso
Deciptimouse was designed and built by students at the University of Texas in El Paso
FAB 1 parodies the Thunderbird’s pink Rolls Royce. It uses a STM32 processor running at 72 MHZ with 96k of RAM. It has 6 TSL262R sensors and 100mAh LiPo batteries. The total weight of 100g is driven by six powered wheels, allowing the mouse to accelerate and decelerate at much higher speeds. The two centre wheels are mounted 0.5mm lower than the others, allowing uncompromised high speed cornering. It measures 115mm(L) x 75mm(W) x 22mm(H).
My thanks to David Otten, the contest organiser, for the preceding text and results. His full report can be downloaded here: APEC2017Report
The maze had two principal routes.
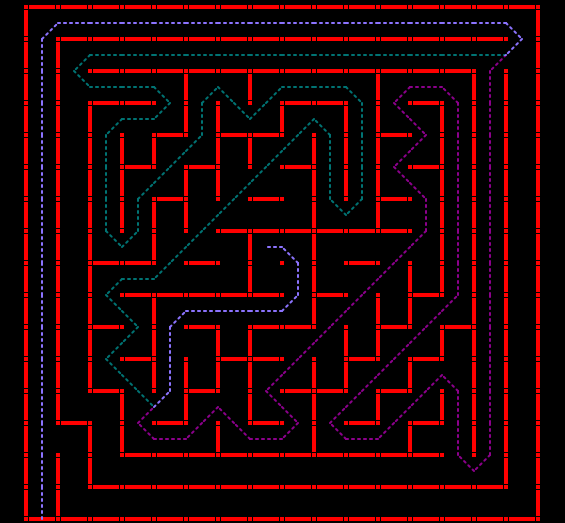
The green path was arguably the better choice as well as being a little shorter and yet the winning mouse took the magenta path. My mouse also took that path which was a little surprising. It would not have made a significant difference to the run time but the longer diagonal is more dangerous on the magenta path than it is on the green path because of the wall orientation.
Overall, the contest demonstrated once again the huge advantage to be gained from having a fan to create a partial vacuum under the mouse and increase the downforce during the turns.
Green Ye has a web page with further details: http://micromouseusa.com/?p=2103
There are also some videos available on Youtube:
Congrats Pete, that’s a great result on a tricky maze.